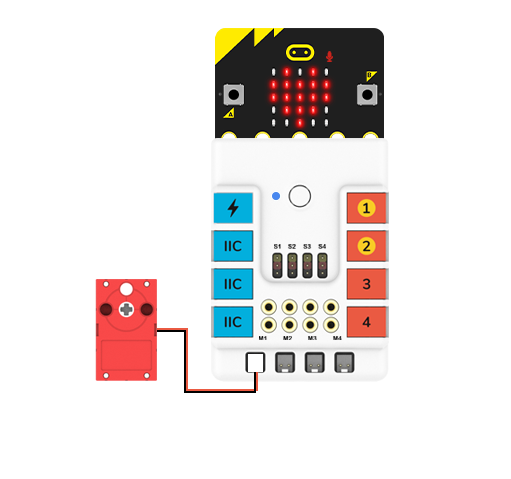
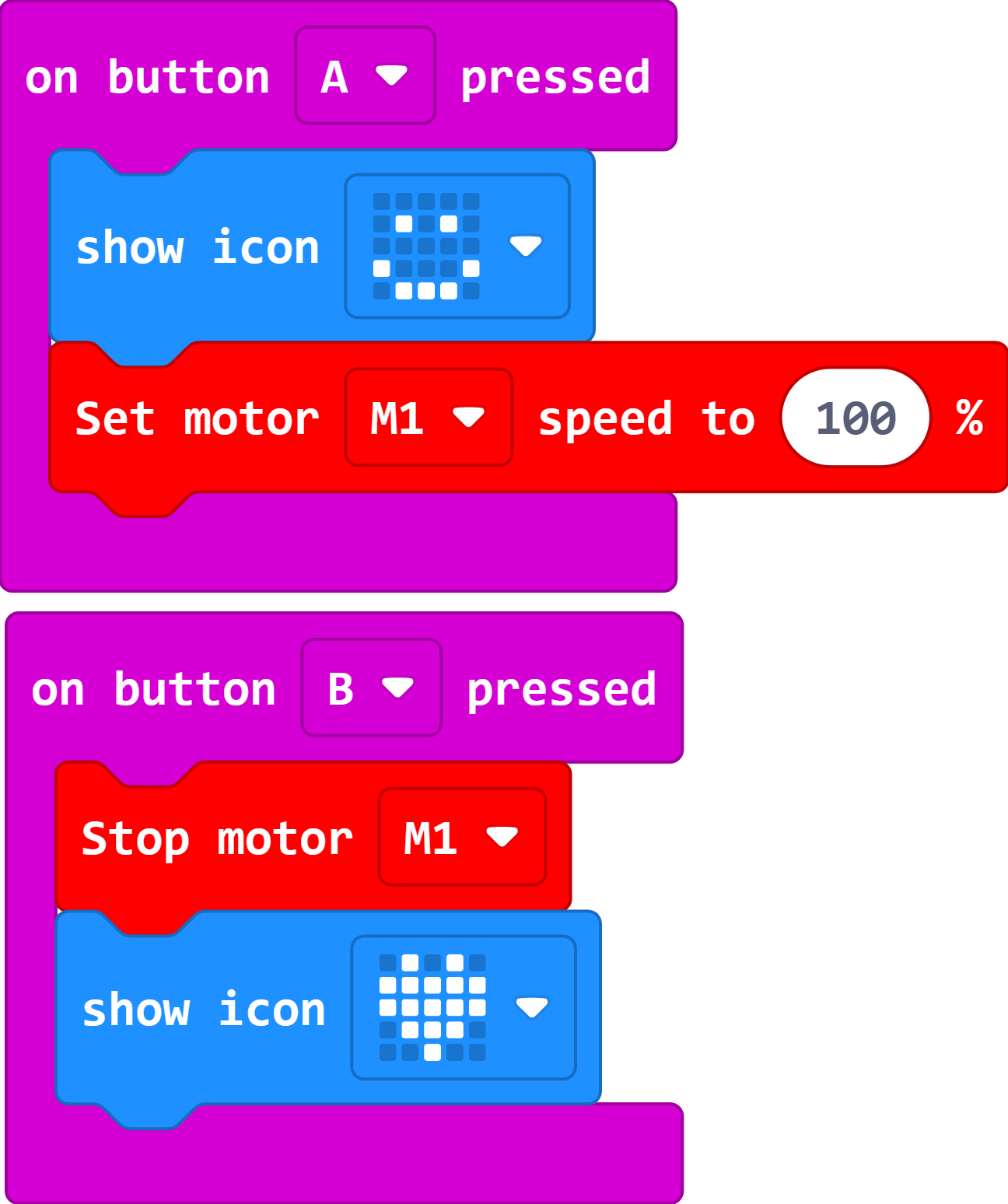
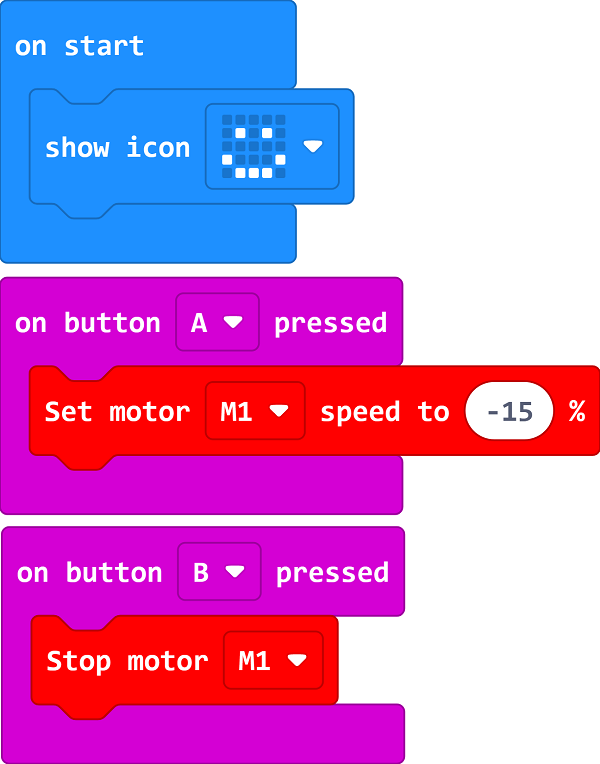
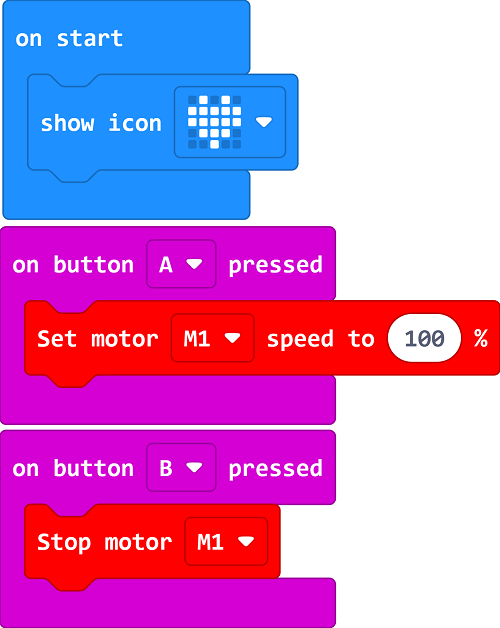
Activa o desactiva el motor conectado al pin que indiquemos.
Indica en qué pin has conectado el sensor de contacto
Comprueba si se ha activado el sensor de contacto. Habitualmente se utiliza dentro de un bloque condicional «si… entonces…»
Enciende o apaga el led contectado al pin que se indique.
Realiza la lectura del medidor de alcohol. Podemos utilizar el bloque con operadores matemáticos, lógicos o almacenar el valor en una variable.
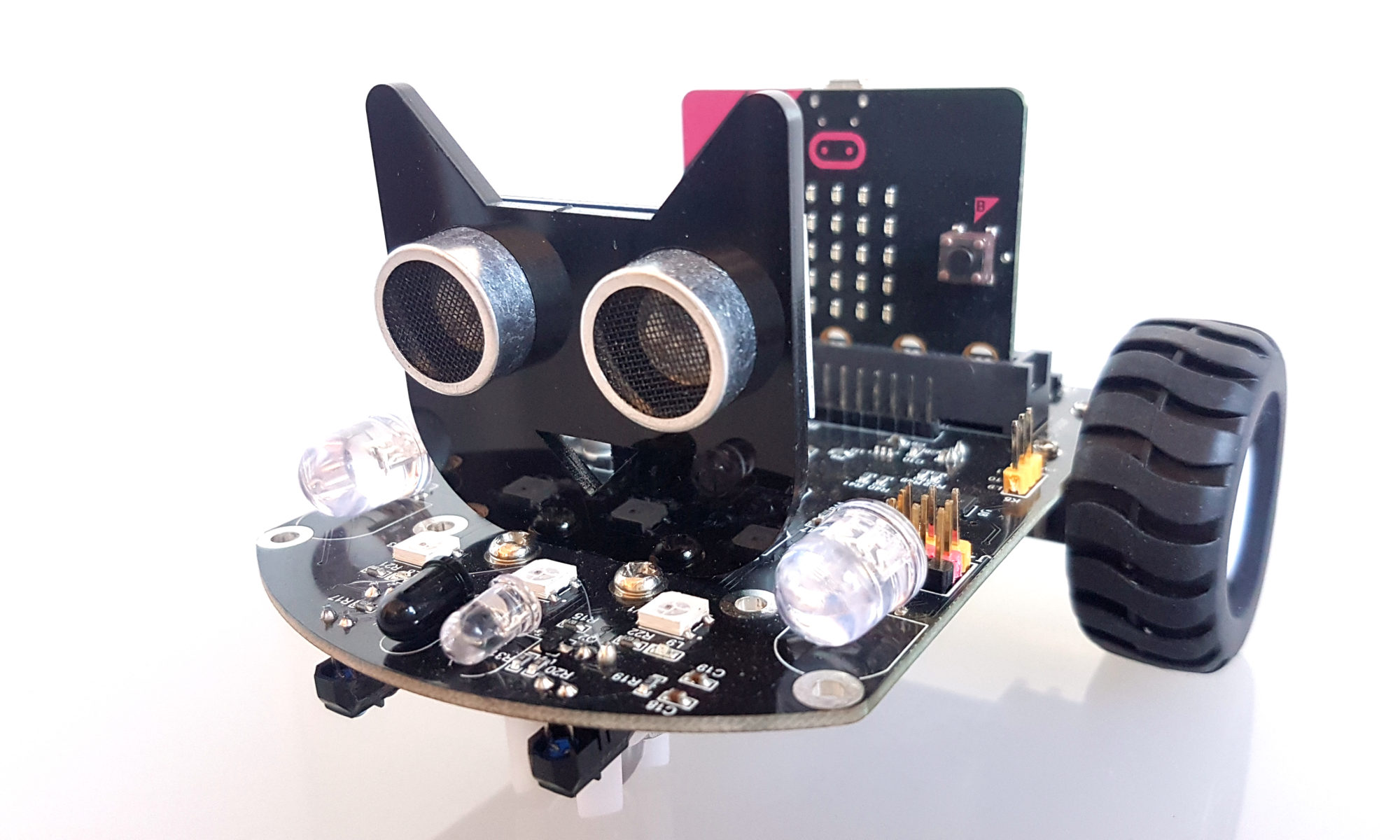
Realiza la lectura del sensor ultrasonidos, aportando la distancia al objeto más cercano. Podemos utilizar el bloque con operadores matemáticos, lógicos o almacenar el valor en una variable.
Realiza la lectura del sensor de luz, aportando la distancia al objeto más cercano. Podemos utilizar el bloque con operadores matemáticos, lógicos o almacenar el valor en una variable.