El coche avanza siguiendo el recorrido de una línea negra gruesa
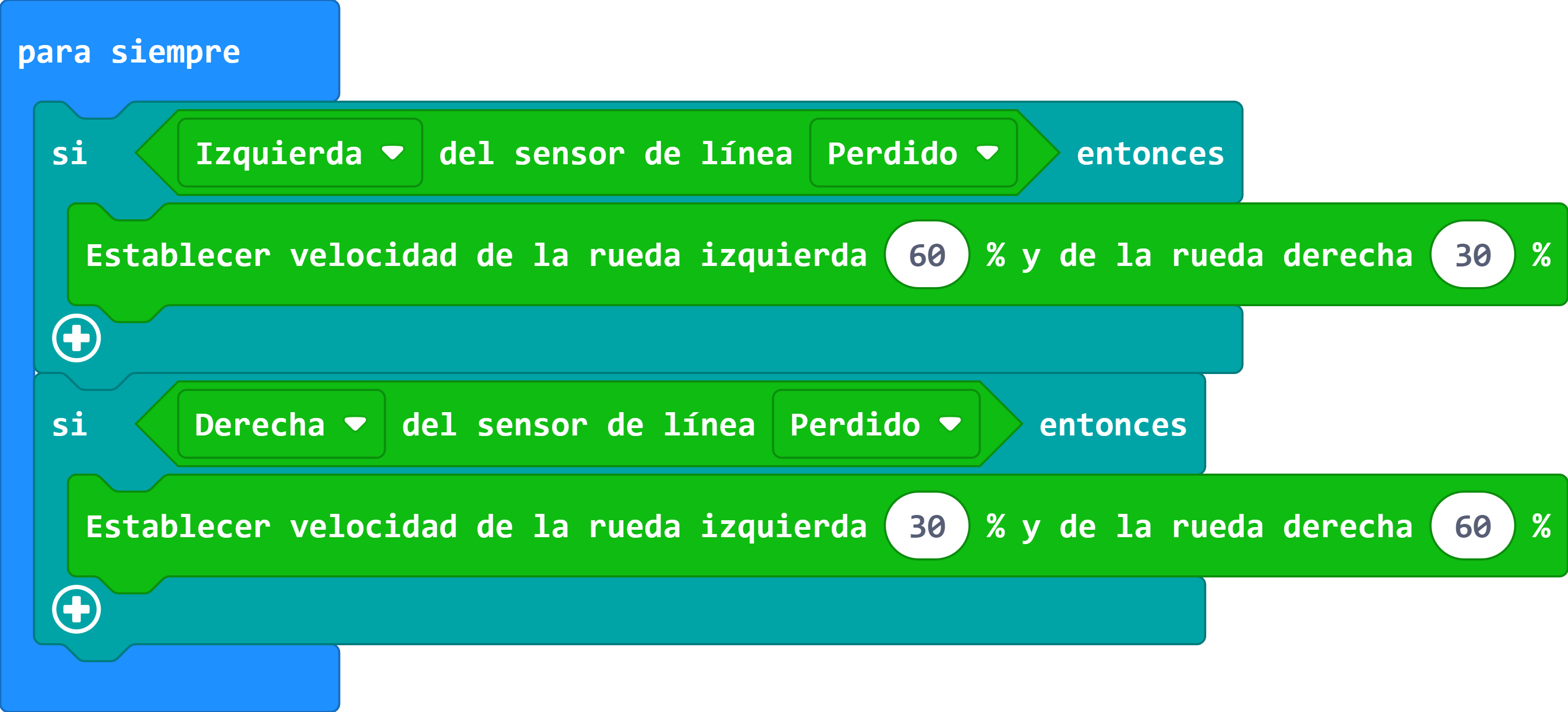
Programación
El coche avanza realizando un movimiento diagonal dentro de la línea. Así avanza girado ligeramente a la izquierda mientras el sensor de la derecha detecte el color blanco, y girará ligeramente a la derecha mientras el sensor de la izquierda detecte el color blanco