Una vez construido el Coche LOG 1441 realizamos una sencilla programación para aprender a utilizar los motores y realizar sencillos movimientos del vehículo.
Construcción:
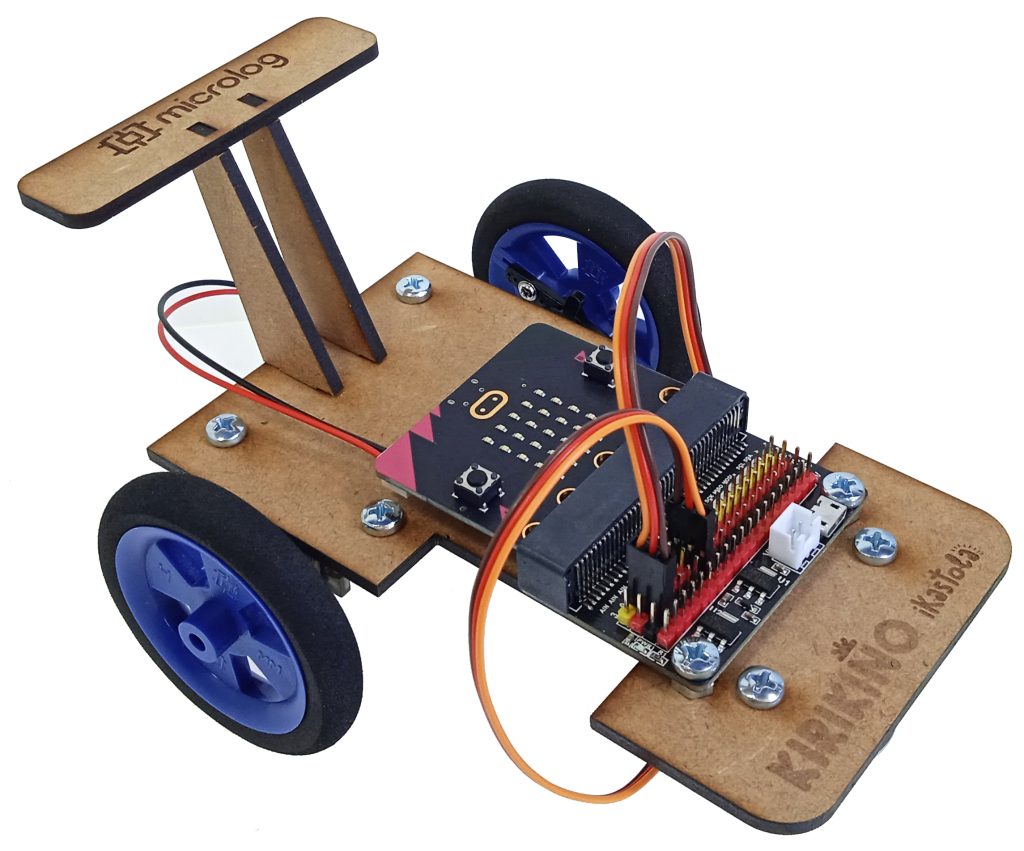
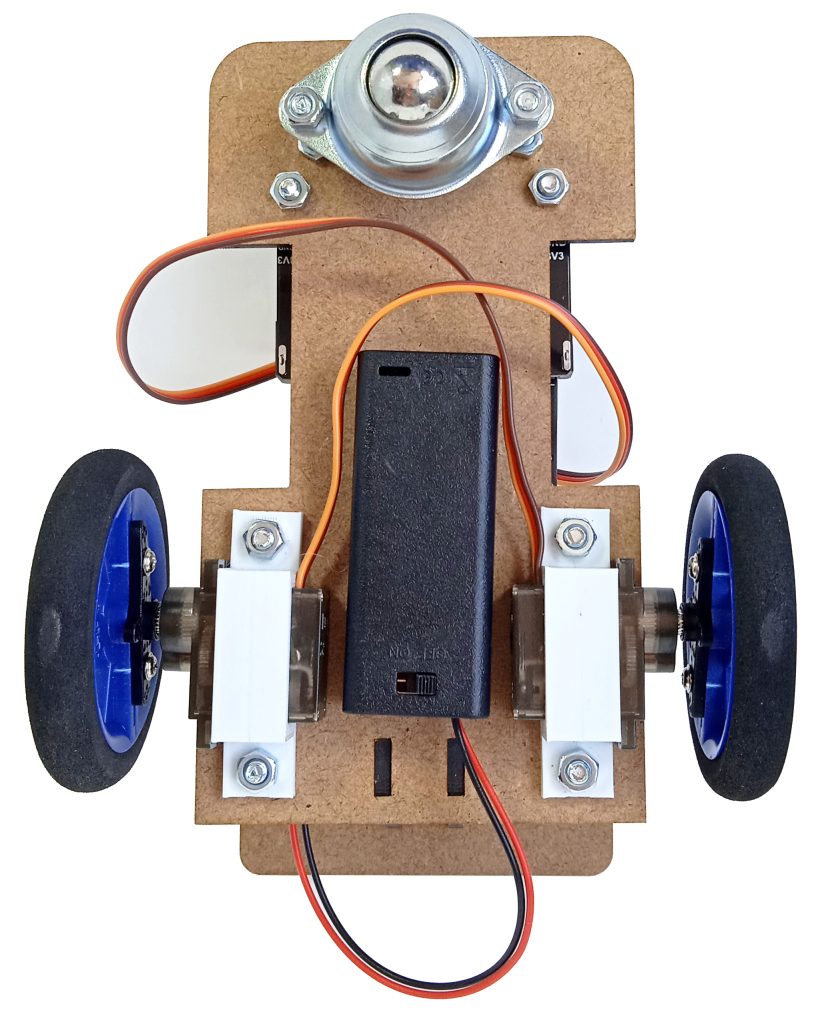
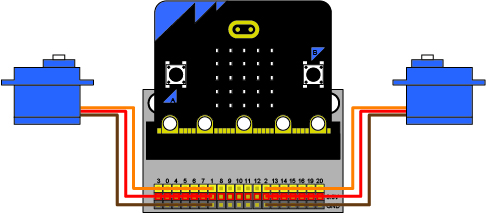
El coche consta de 2 servomotores continuos conectados a las dos ruedas traseras. Estos motores se conectan a los pines 1 y 2 del zócalo de la placa micro:bit.
Configuración de la placa:
Conectar la placa microbit al puerto USB del ordenador utilizando un cable Micro USB.
El sistema de programación es muy sencillo. Se basa en un lenguaje de bloques que minimiza los errores sintácticos, pudiendo poner el foco de atención en la lógica de programación.
Para configurar el idioma del software, accede al menú del engrane (esquina superior derecha), selecciona “language” y elige el idioma que desees.
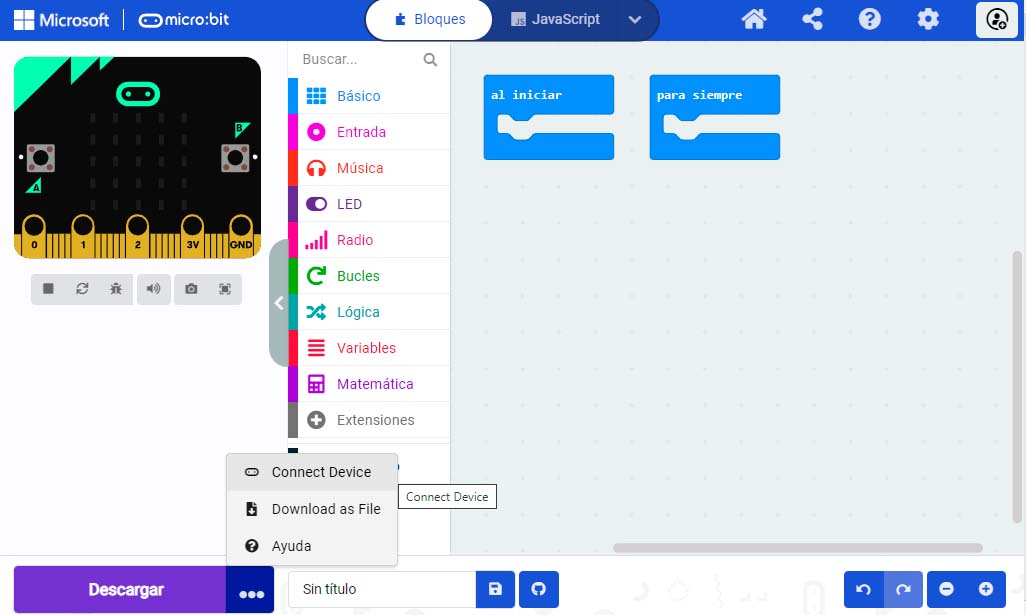
El ordenador reconoce la placa microbit como si fuese una memoria externa. Puedes descargar tus programas y copiarlos en la placa utilizando el explorador de archivos, o emparejar la placa con el software para que la descarga sea directa a la placa.
Para emparejar la placa con el software, pulsa en el icono “…” junto al botón descargar
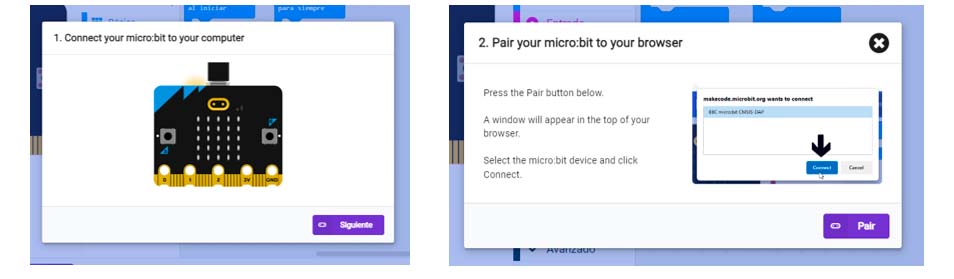
Pulsa en “connect device”. Si no tienes conectada la placa, conéctala al PC, pulsa en siguiente y luego en Pair
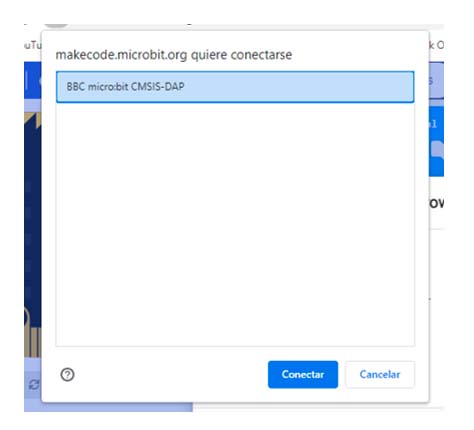
En la siguiente ventana pulsa sobre la placa bbc microbit y después en conectar.
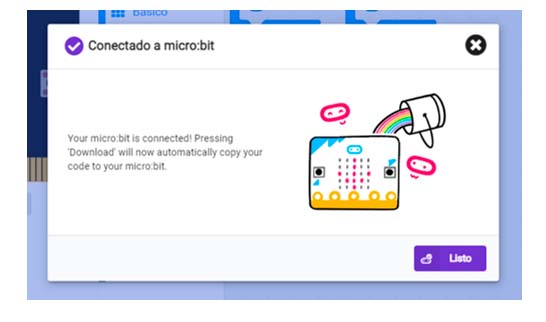
Si la placa se ha podido conectar correctamente, aparecerá el siguiente mensaje:
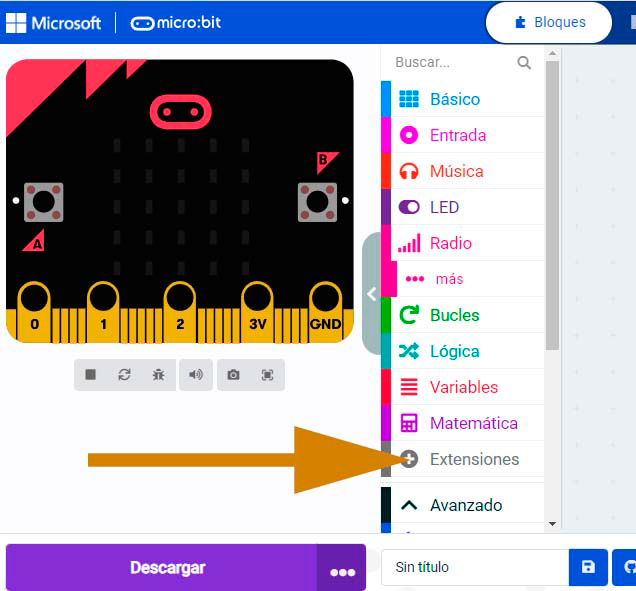
Para actuar sobre los motores, necesitas agregar la extensión «servo».
Pulsa en Extensiones:
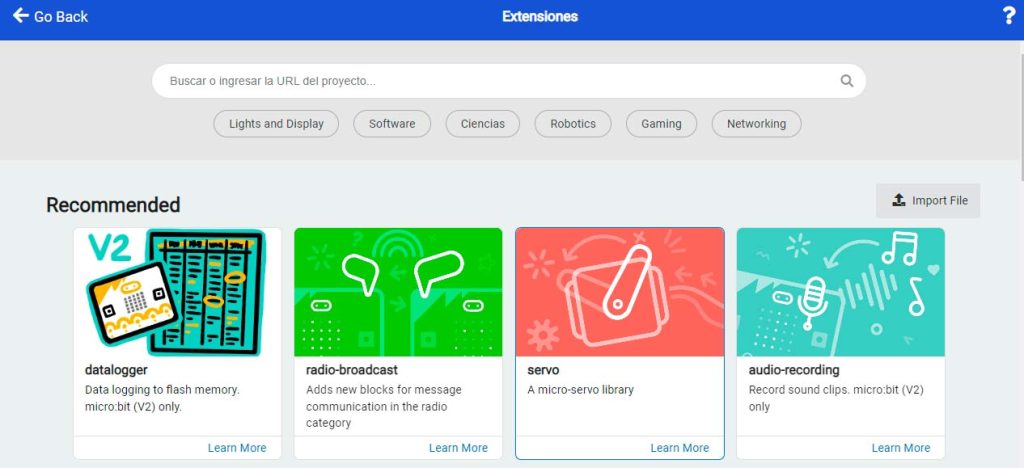
Y pulsa sobre la extensión «servo» para que se agregue a tu proyecto.
Aparece una nueva sección, «servo» (bloques verde), con bloques específicos para el control de los servomotores.
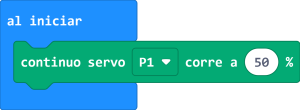
1. Avanzar recto
Para mover los servomotores utilizamos el bloque «continuo servo P0 corre a 50%». Cambia P0 por P1, y descarga el programa en la placa microbit pulsando en el botón morado «descargar».
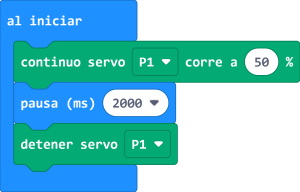
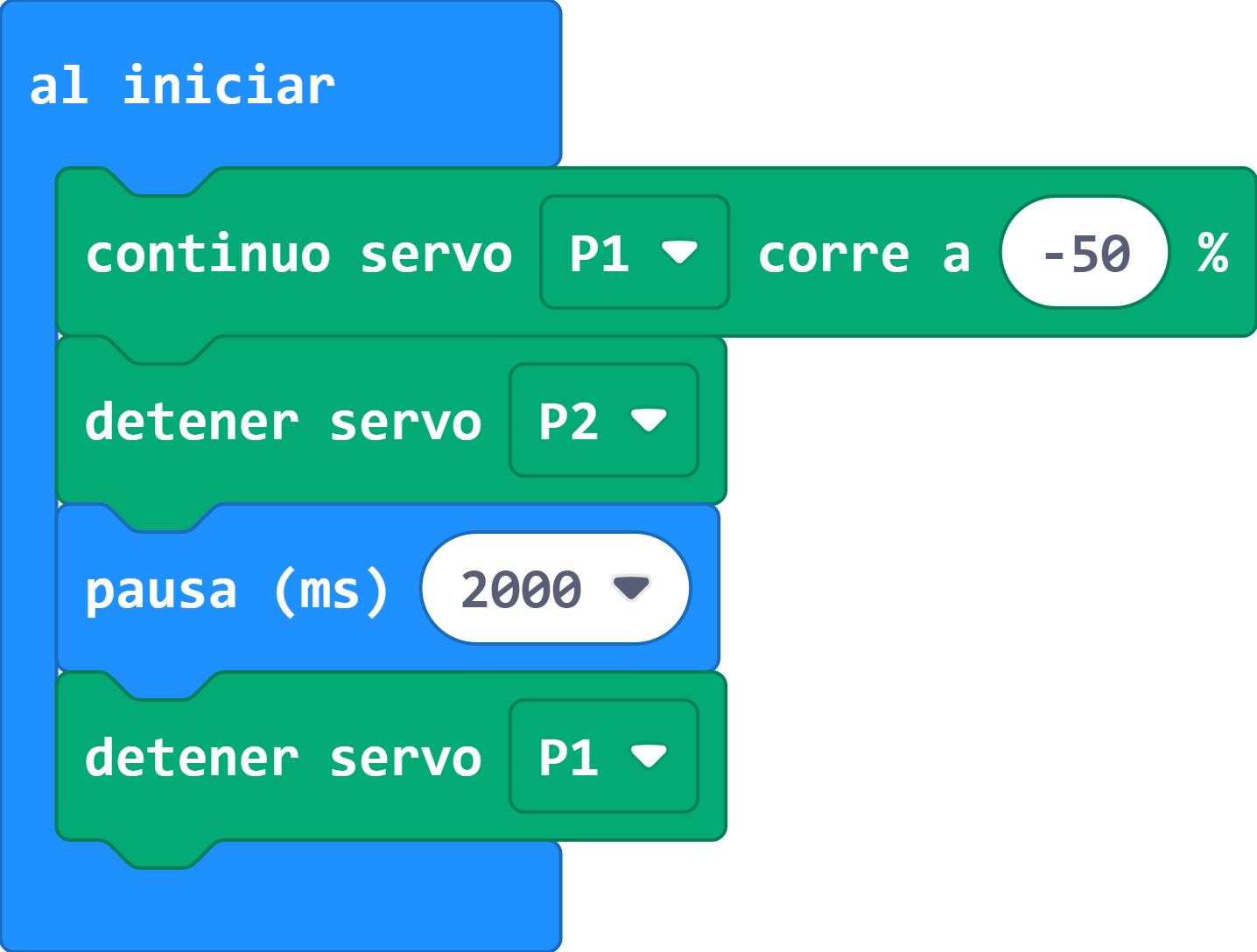
Uno de los motores comenzará a girar. Como puedes comprobar, en ningún momento el motor para. Esto se debe a que no le hemos indicado cuánto tiempo debe girar ni le hemos dado la orden de parar. Para que el motor gire durante 2 segundos, debes incluir el bloque «pausa» (dentro de la sección básico, bloques azules) e indicar el tipo que va a girar el motor. A continuación utiliza el bloque «detener servo para parar el motor».
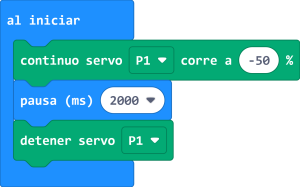
La potencia del motor puede variar desde 0 hasta 100, siendo 100 su máxima velocidad.
Para que el motor cambie el sentido de giro, basta con introducir un signo negativo en la potencia del motor.
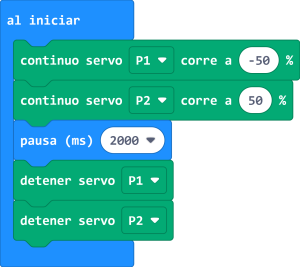
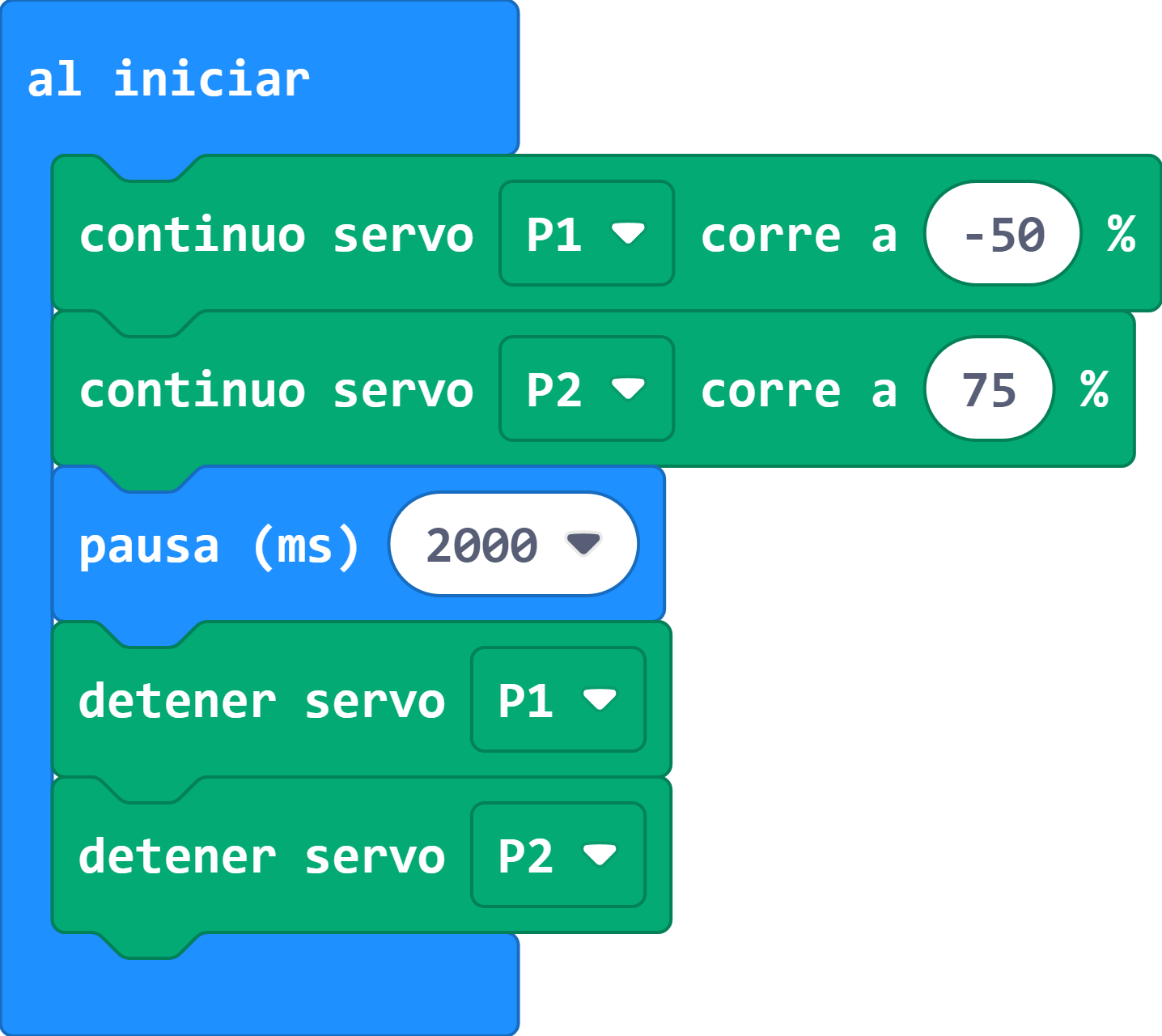
Para que el vehículo avance o retroceda recto, ambos motores deben girar en el mismo sentido y a la misma velocidad. Si los motores estuviesen orientados hacia el mismo lado del coche, basta con escribir la misma velocidad de giro, pero al estar enfrentados solo podemos conseguir que ambos giren en el mismo sentido si indicamos velocidades de distinto signo entre ellos.
2. Giro
Para que el coche gire, debe hacer una diferencia de velocidad entre los motores. Podemos generar un giro brusco o un giro menos pronunciado:
Giro brusco: Un motor gira y el otro motor se encuentra parado.
Giro suave: Los motores giran a distinta velocidad.