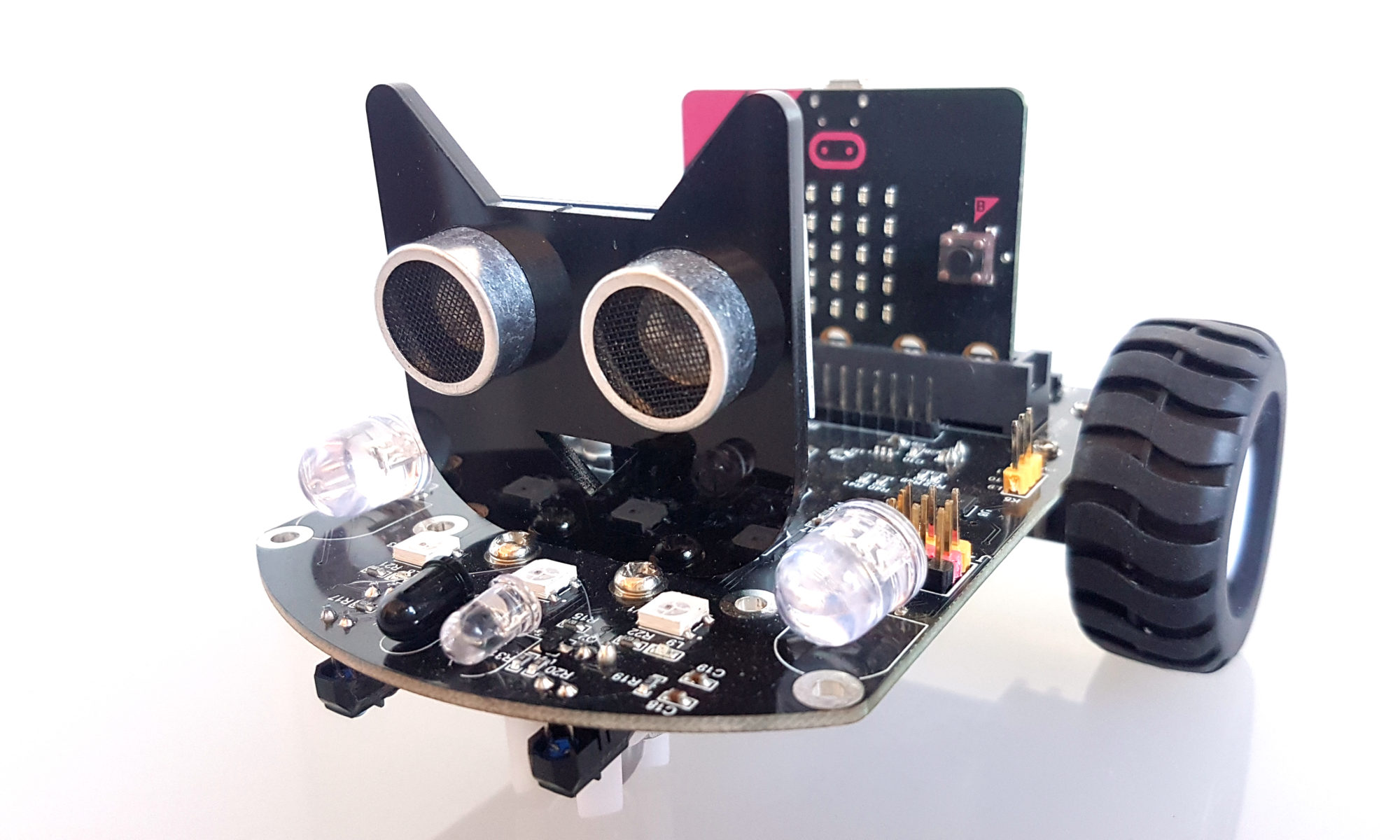
El coche busca un objeto cercano y se acerca a él para empujarlo, utilizando la medición del sensor ultrasonido.
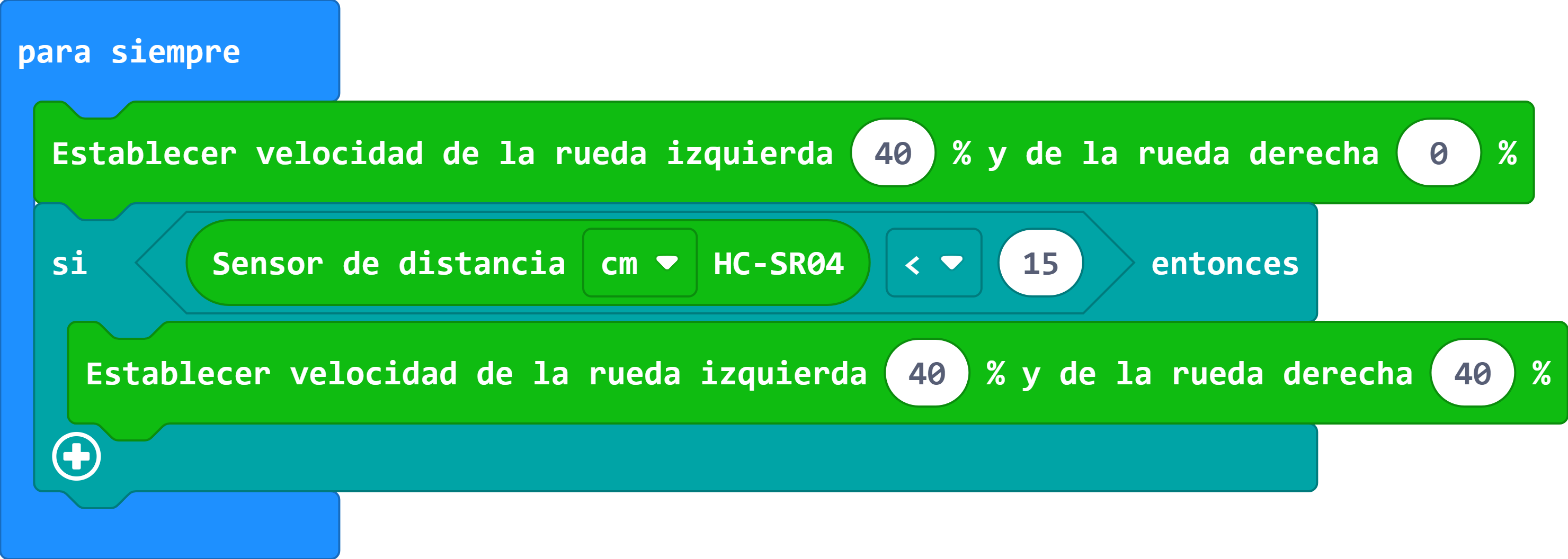
Programación:
Establecemos una velocidad de giro del 40% en la rueda izquierda y 0 en la derecha para provocar un giro lento en el coche. Si mientras que está girando, el sensor ultrasonido detecta un obstáculo a una distancia menor de 15 cm, ambas ruedas giran al 40% para que el vehículo avance en línea recta hacia el objeto.