Imprimir en el puerto serie los movimientos que debe hacer un vehículo para seguir una línea en función de la lectura del sensor.
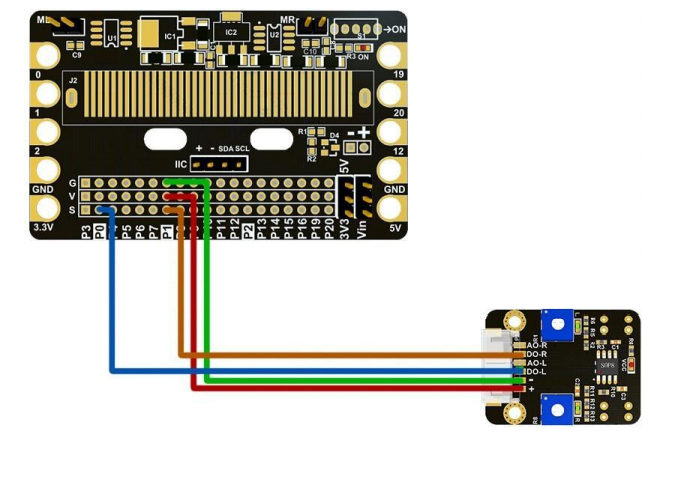
Circuito:
El sensor de línea se conecta a dos pines: P0 y P1.
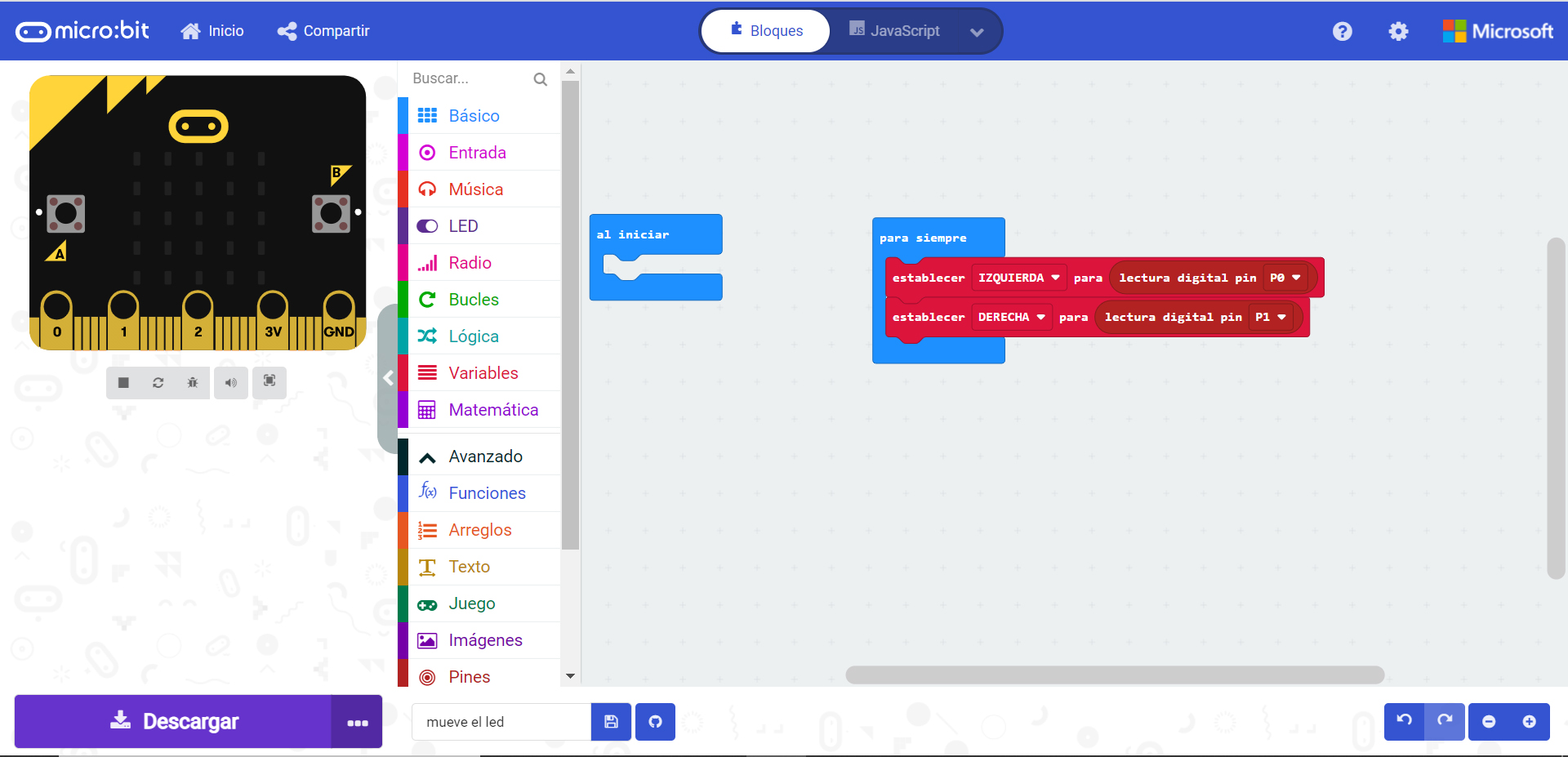
Programación:
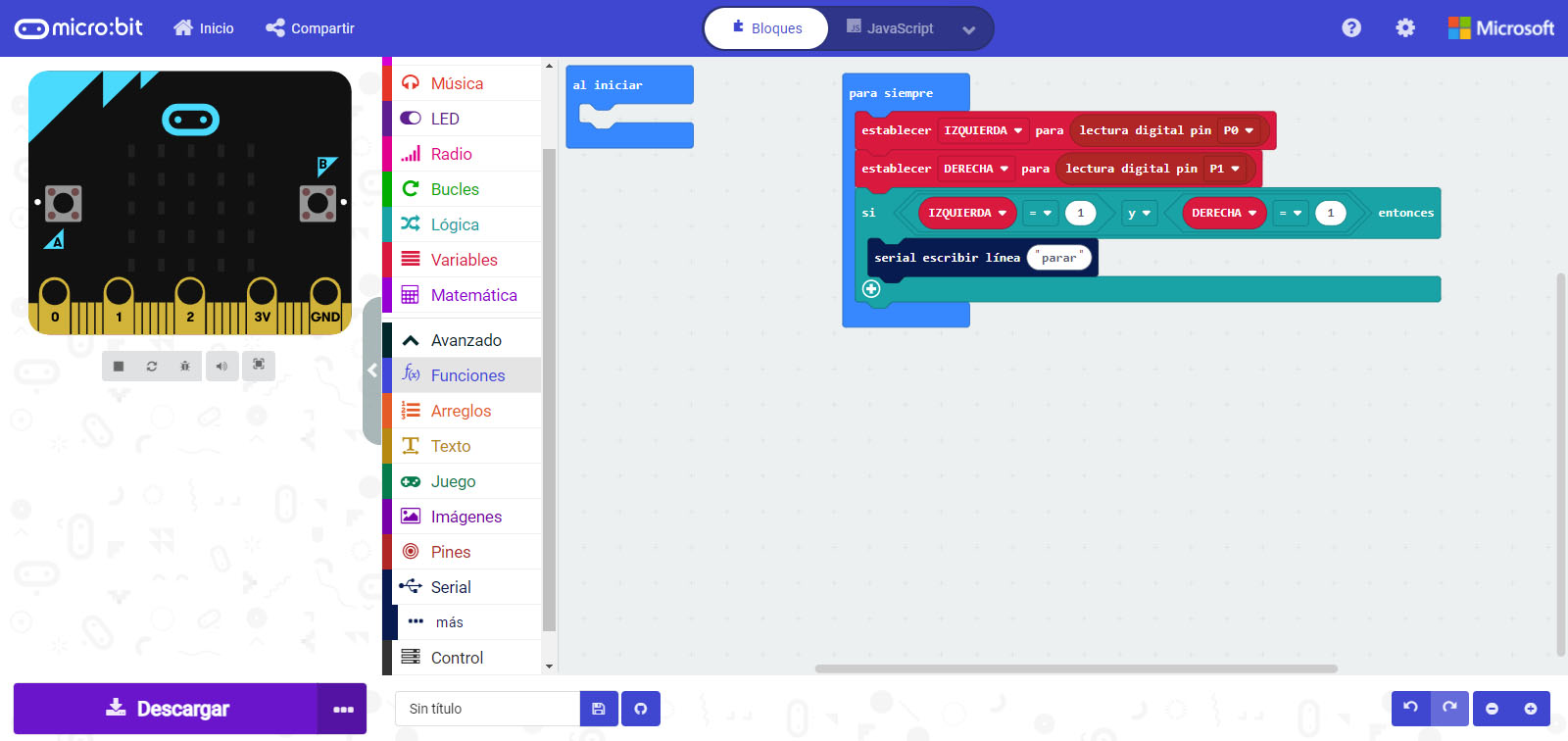
El módulo incluye dos sensores, y necesitaremos dos variables para guardar la lectura de cada sensor. En el bloque «para siempre» el primer paso será guardar la lectura del sensor.
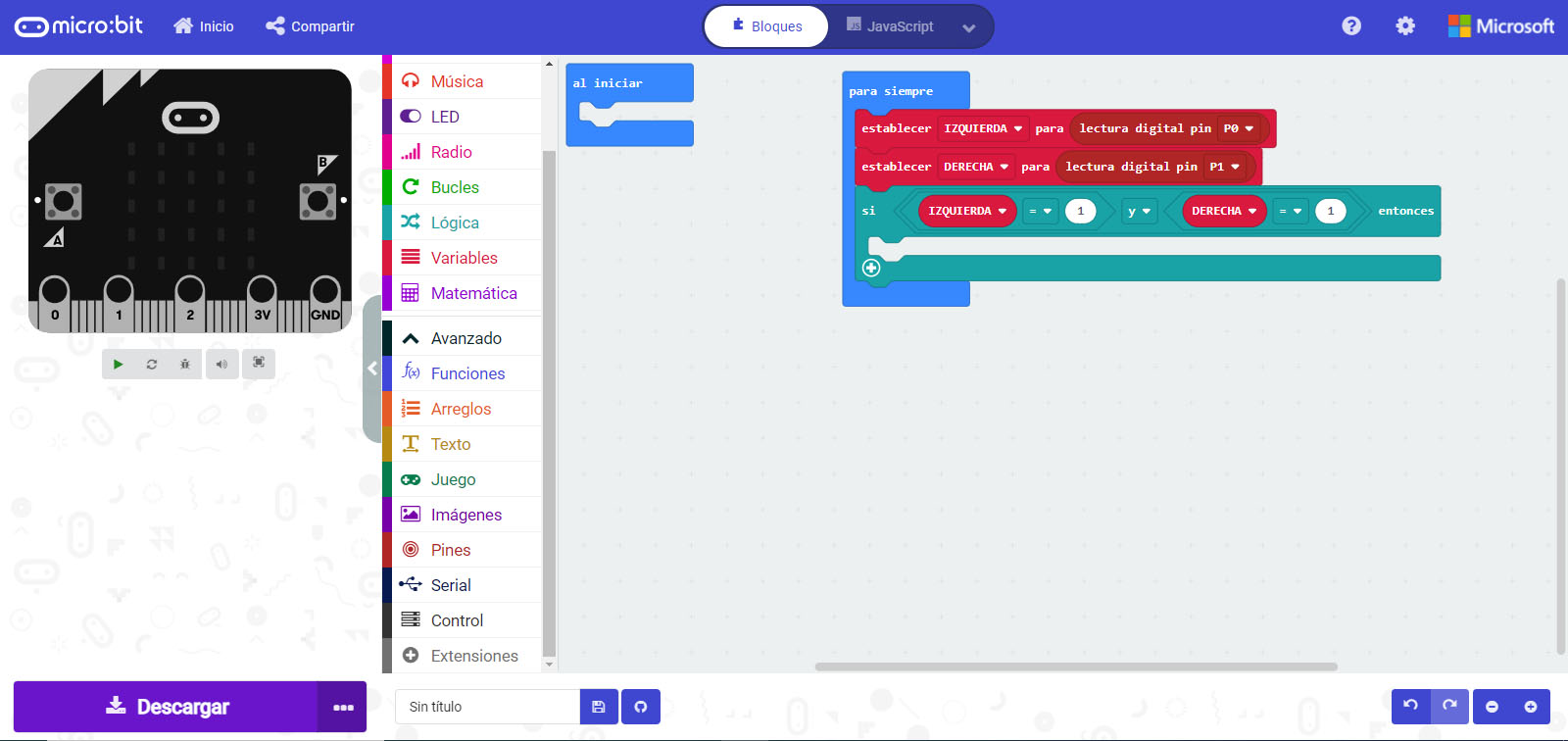
A continuación analizamos los datos del sensor para enviar al puerto serie el movimiento que debería realizar el vehículo para mantenerse sobre la línea negra. Si ambos sensores devuelven el valor 1, el coche estará en la zona blanca, y deberá pararse. Necesitas los bloques «si…entonces…», «=», «y». Todos ellos los encontrarás en la sección «lógica».
Para enviar el mensaje «parar» por el puerto serie, utilizamos el bloque «serial escribir línea» que localizarás en la sección «Serial»
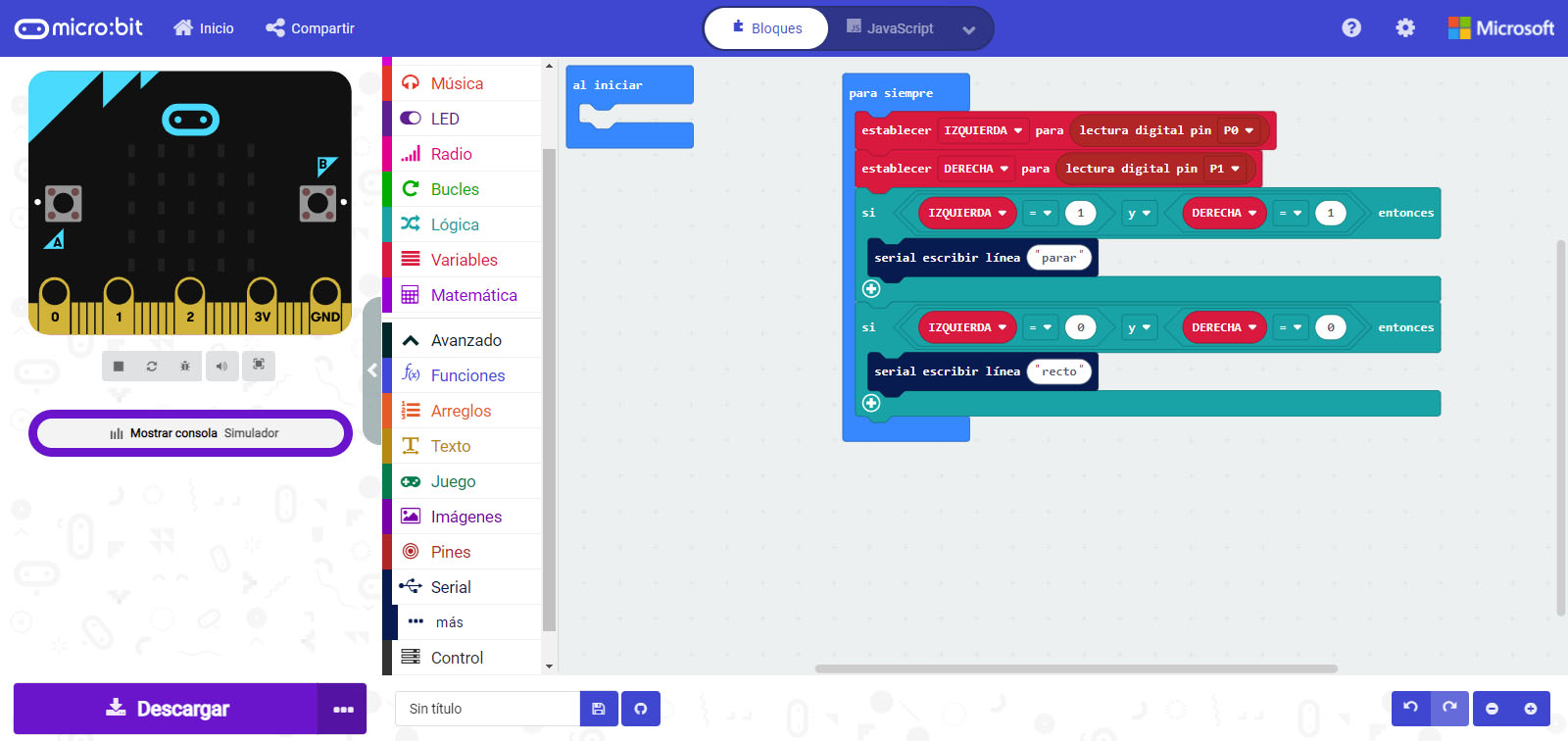
Si ambos sensores detectan zona negra, el enviamos el mensaje «recto».
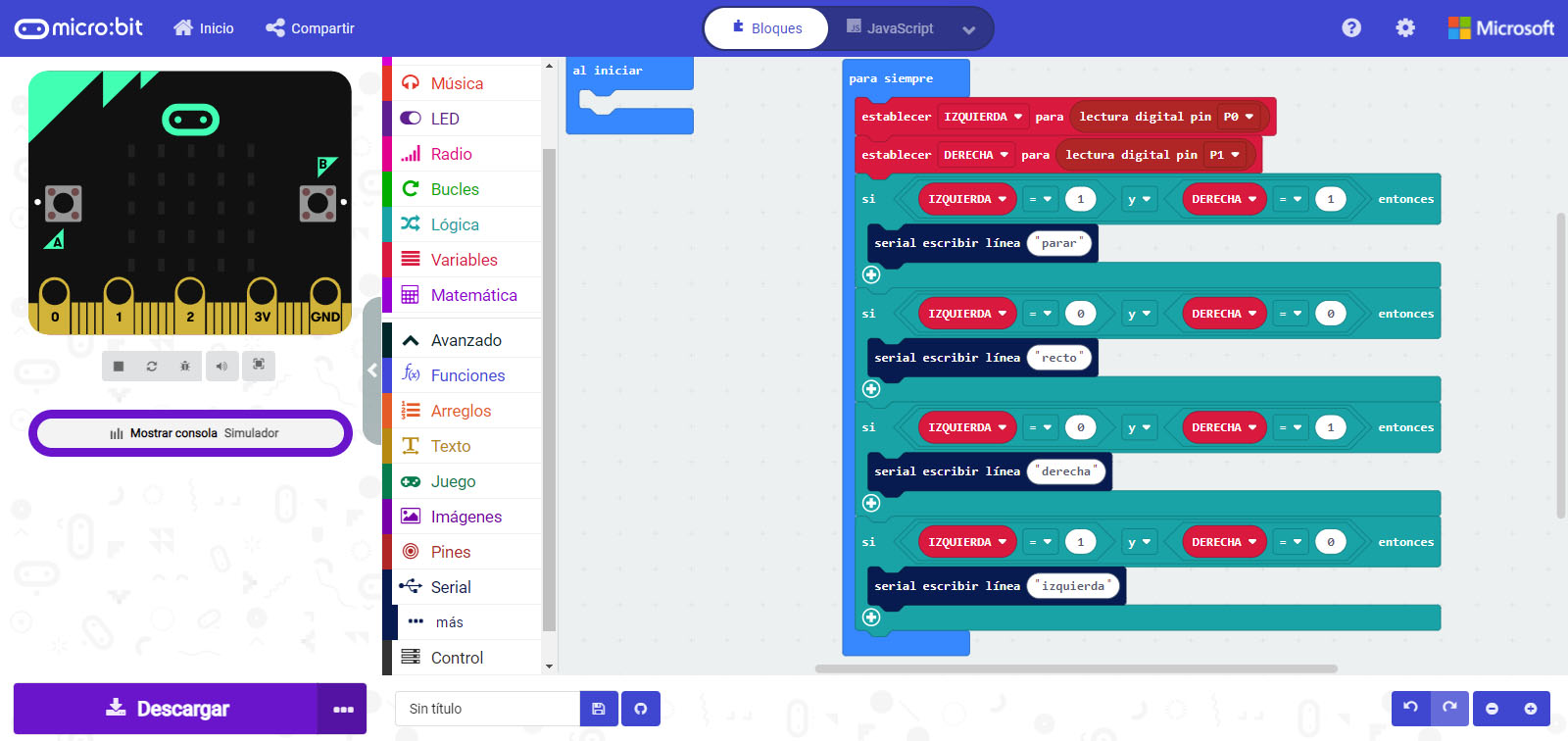
Si un sensor está en zona blanca y el otro en zona negra, enviaremos la orden de girar en función de cuál sea el sensor que esté fuera de la zona negra.
Descarga el programa en la placa pulsando en «descargar» y comprueba el resultado. Si pulsas en mostrar consola simulador podrás ver el resultado en el puerto serie.