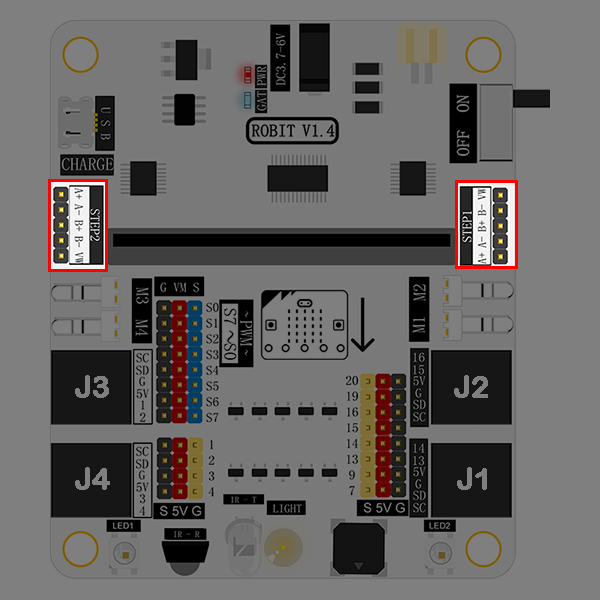
La placa Robit V2.0 dispone de dos conectores específicos para motores paso a paso. Un motor paso a paso es capaz de convertir los impulsos eléctricos en movimientos angulares. Es muy preciso en su movimiento, por lo que es habitual verlo en desarrollos que requieran movimientos muy exactos cuando éste sea repetitivo, asegurando que en cada giro el motor posicione el objeto siempre en la misma posición exacta.
Para su programación encontraremos bloques específicos en la sección Robit de la extensión instalada.
BLOQUES
Bloque Stepper - degree
Utilizamos este bloque para indicar al motor paso a paso los grados que debe girar. Si queremos que el motor gire en sentido contrario, pondremos los grados con números negativos.
PROGRAMACIÓN
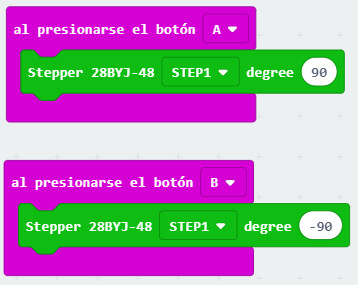
Programamos Micro:bit para que al presionar el pulsador A, el motor paso a paso gire 90 grados en un sentido y al presonar el pulsador B gire 90 grados en sentido contrario.