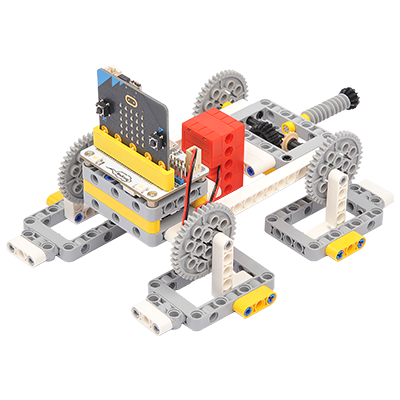
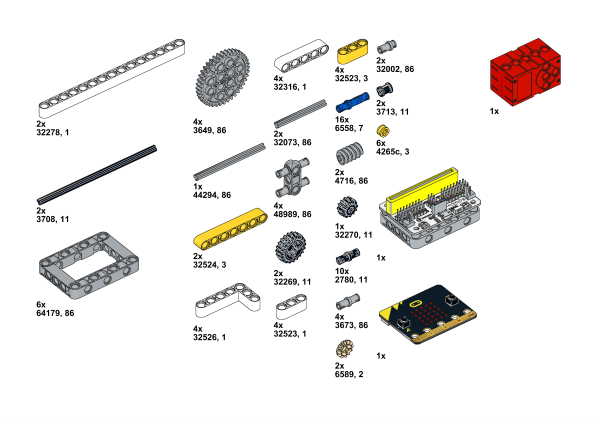
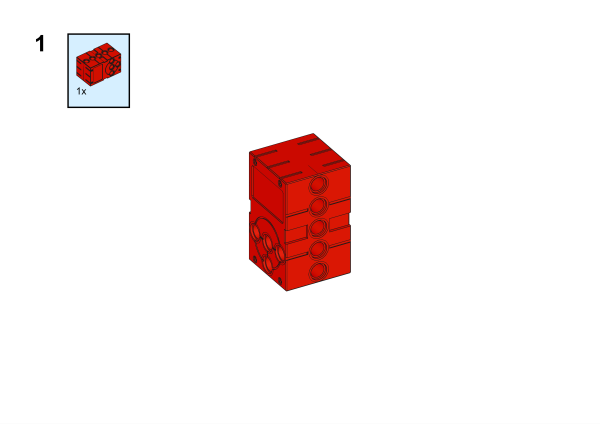
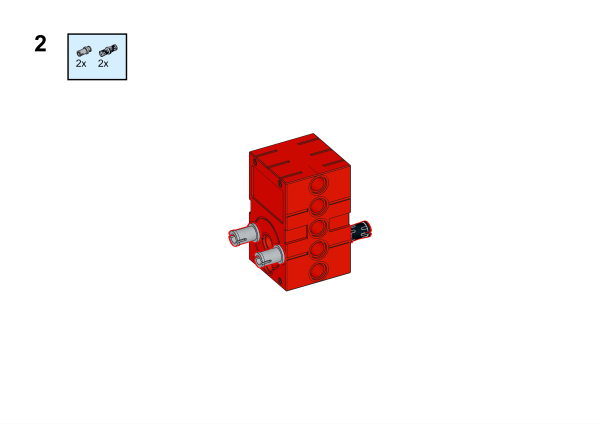
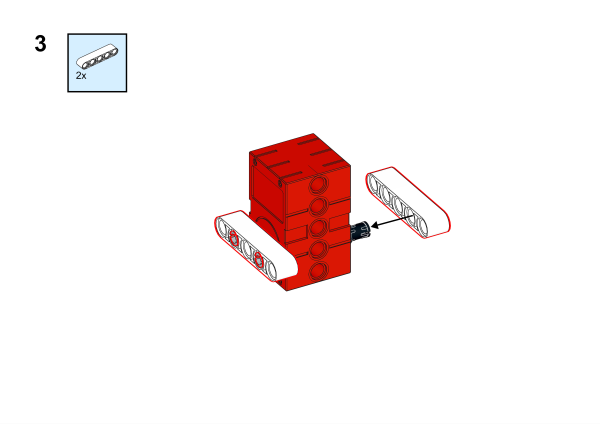
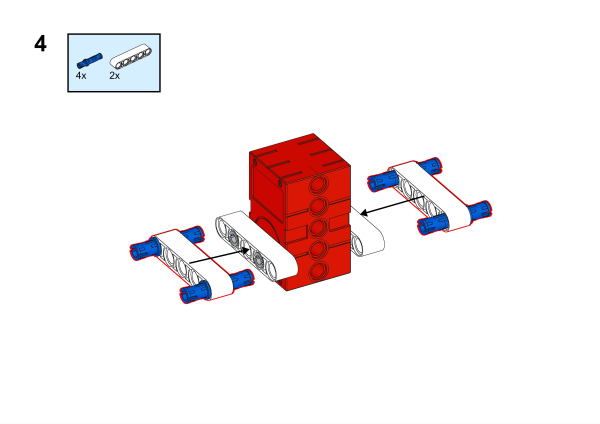
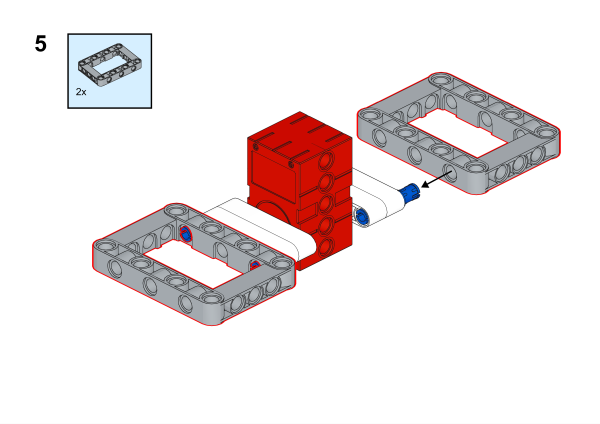
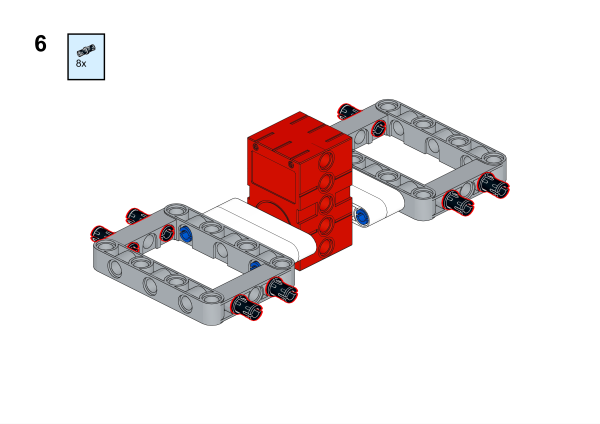
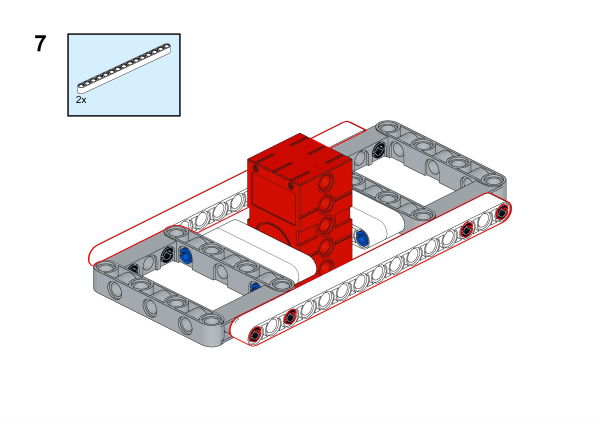
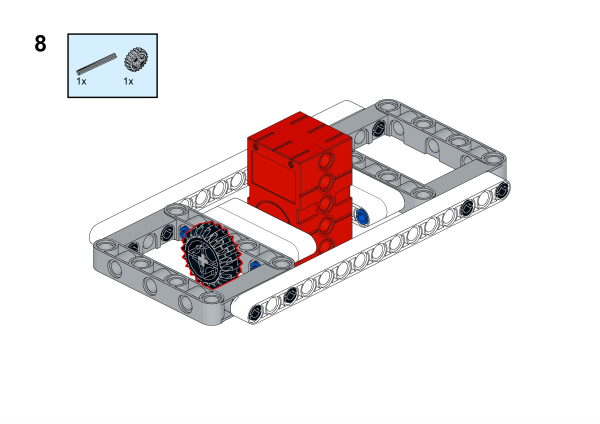
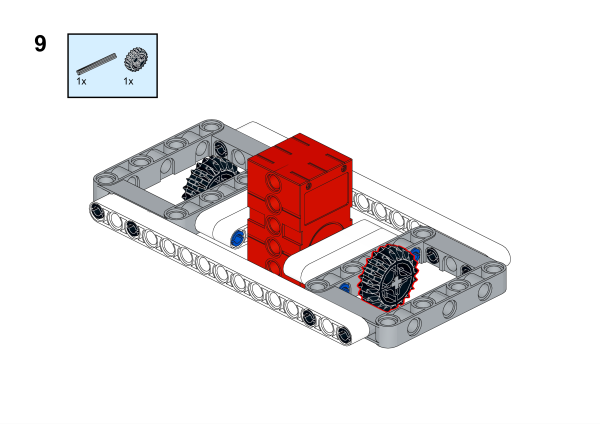
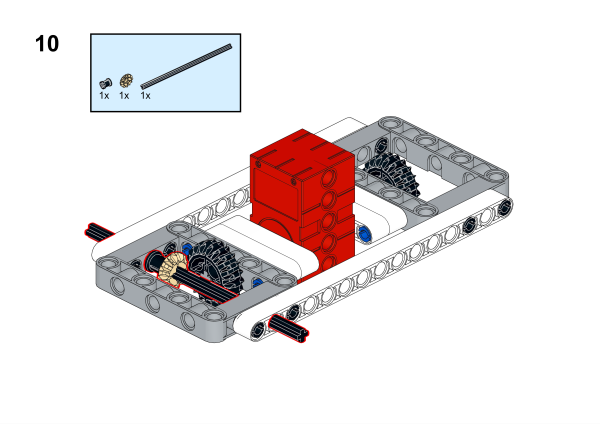
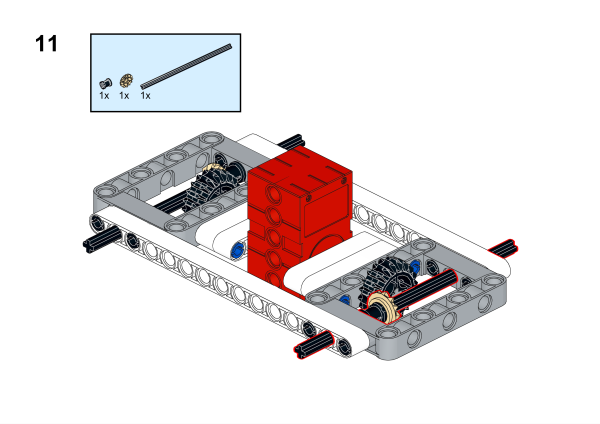
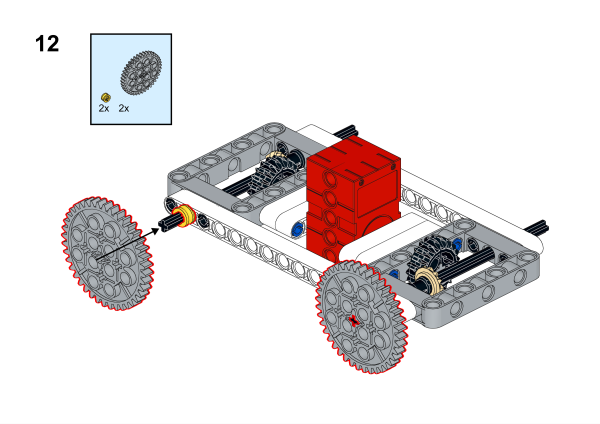
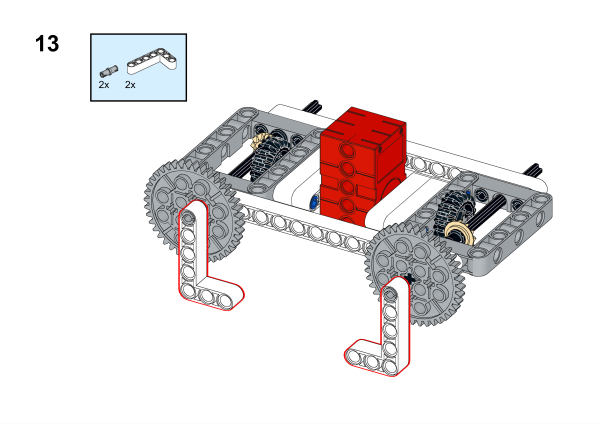
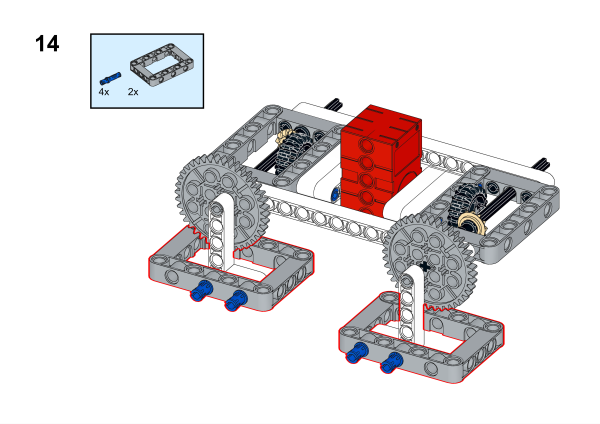
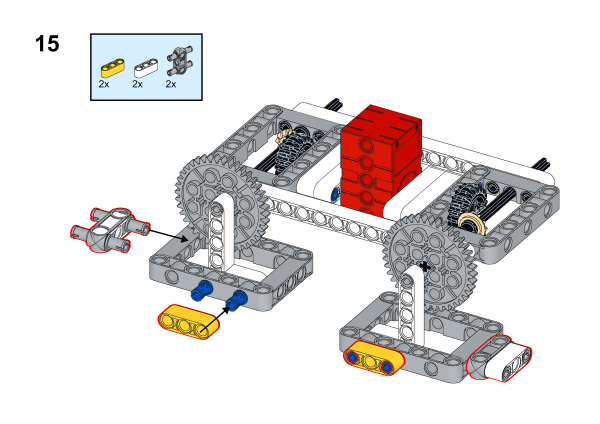
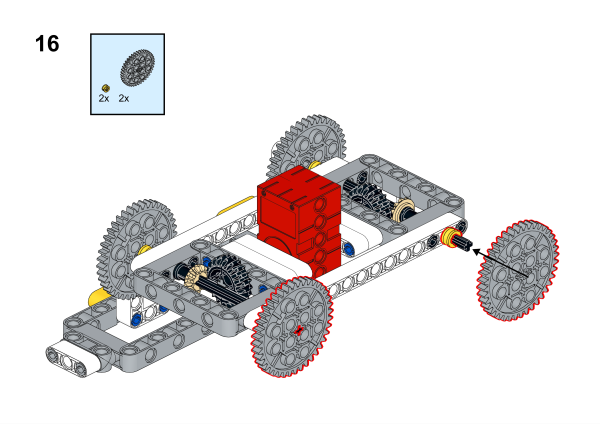
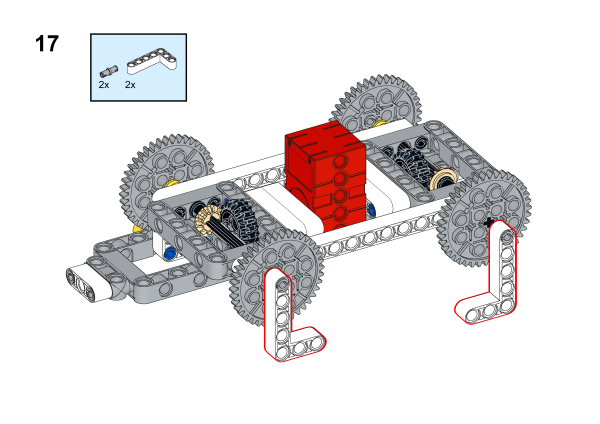
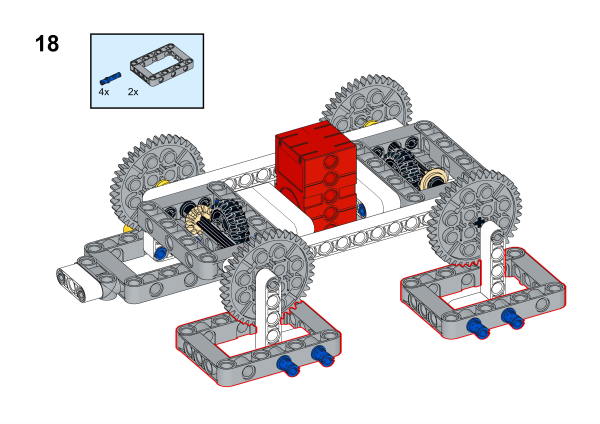
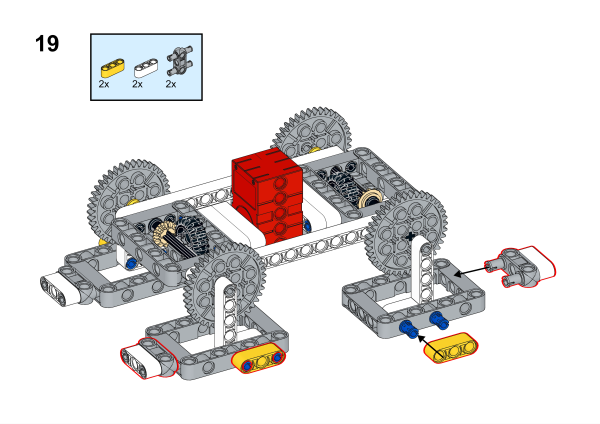
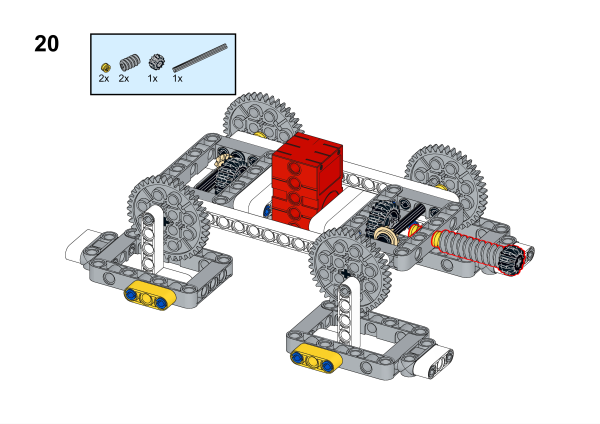
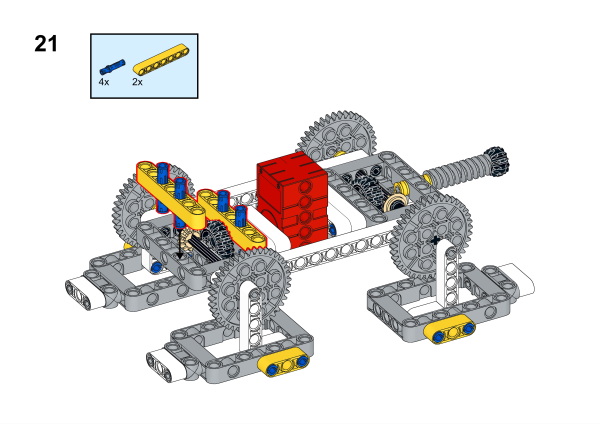
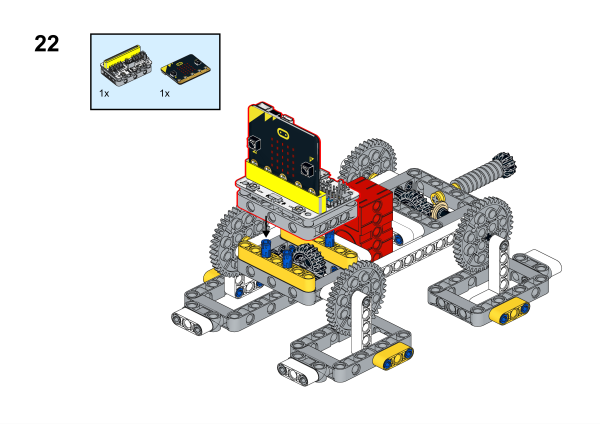
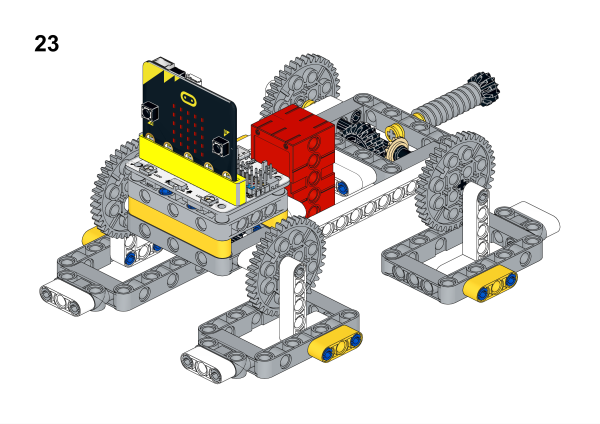
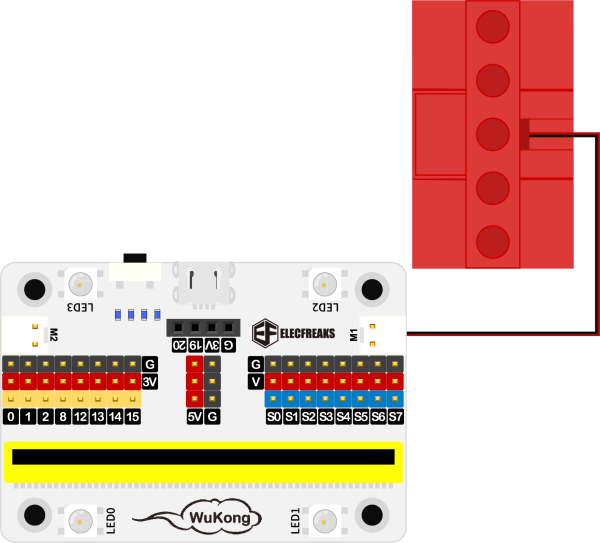
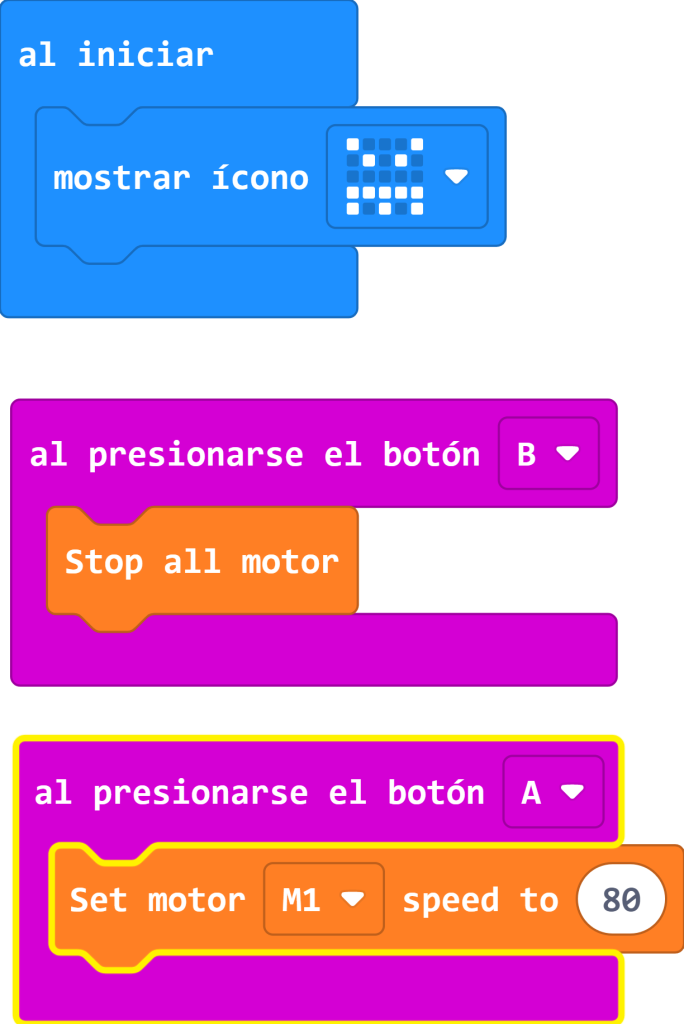
Publicado el febrero 14, 2023 por micrologPERRO ROBÓTICO Objetivo: Piezas necesarias: Construcción paso a paso: Paso 1 Paso 2 Paso 3 Paso 4 Paso 5 Paso 6 Paso 7 Paso 8 Paso 9 Paso 10 Paso 11 Paso 12 Paso 13 Paso 14 Paso 15 Paso 16 Paso 17 Paso 18 Paso 19 Paso 20 Paso 21 Paso 22 Paso 23 Conexión de motores: Programación: Descargar el programa: Opción 1:Pulsa en el botón Descargar. Se guardará en el ordenador un archivo con extensión .hex.Conecta la placa microbit al ordenador.Abre el navegador de archivos y verás una nueva unidad llamada «micro:bit»Localiza el archivo .hex y arrástralo dentro de la unidad «microbit». Una vez finalizada la copia del archivo podrás probar el programa.Pulsa el botón A o B de la placa «microbit» y comprueba que los motores se mueven.Opción 2:Conecta la placa micro:bit al ordenadorPulsa en los 3 puntos que verás junto al botón morado «descargar».Pulsa en connect deviceSelecciona la placa microbitUna vez finalizada la conexión, pulsa en descargar y el programa se descargará directamente dentro de la placa micro:bitCuando finalice la descarga, pulsa el botón A o B de la placa y comprueba que los motores se mueven Más información: https://makecode.microbit.org/_E5pWvtMr1CK1