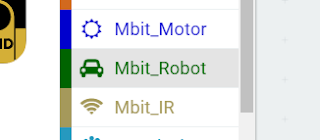

Sección Mbit_Robot
Pulsando en esta sección accedemos a los bloques para programar los movimientos del coche.

Pulsando en esta sección accedemos a los bloques para programar los movimientos del coche.


Microbit incluye en a propia placa dos pulsadores serigrafiados como A y B. Utilizamos este bloque para indicar a la placa que cuando alguien presione un pulsador concreto qué acciones debe realizar.


En esta sección encontraremos módulos específicos para la lectura de los sensores del coche
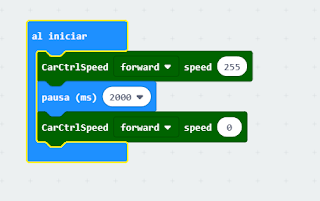
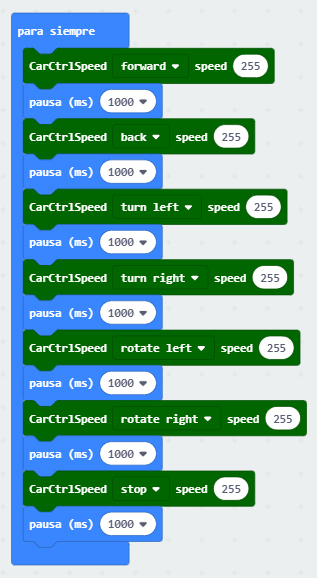
Pulsando en esta sección accedemos a los bloques para programar el coche.

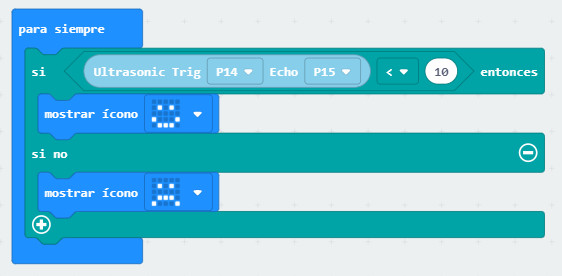
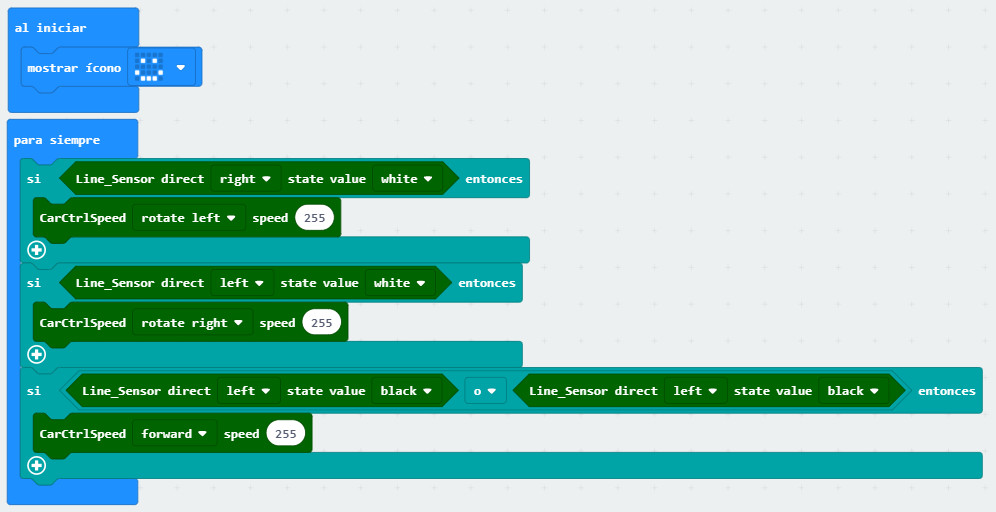
Los robots tienen la capacidad de tomar decisiones en función del entorno que les rodea. Para poder crear esa capacidad de decisión disponemos de bloques en la sección de lógica que nos ayudarán a programar la inteligencia del robot
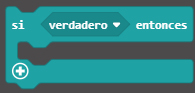

La evaluación de la unión de las condiciones es verdadera si ambas condiciones lo son

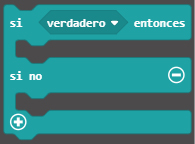
Para que la evaluación de la unión de las dos condiciones se verdadera, basta con que una de las dos condiciones que se unen se cumpla
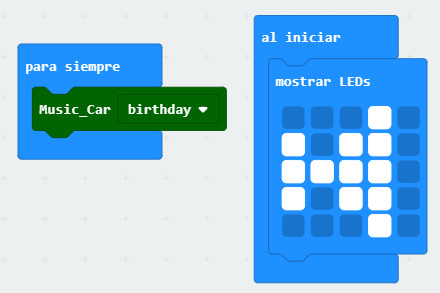
Se encuentra dentro de la sección Mbit_robot. Este bloque reproduce la melodía seleccionada. Hay 20 melodías disponibles.

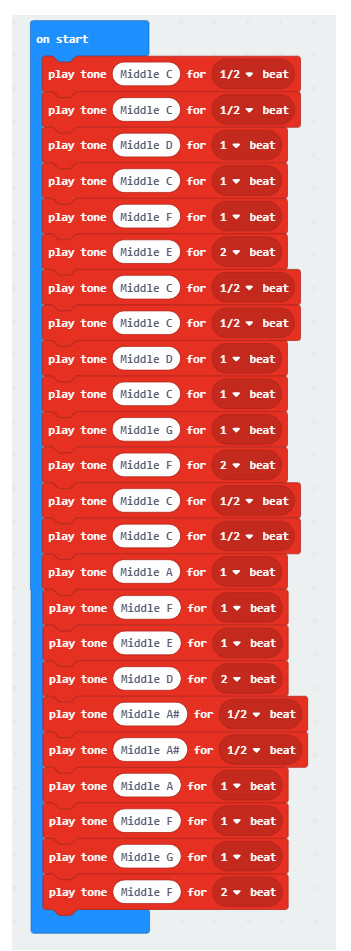
Agrupa un conjunto de bloques que para crear tus propias melodías.

Se encuentra dentro de la sección Music y permite la reproducción de notas musicales que nosotros seleccionemos.
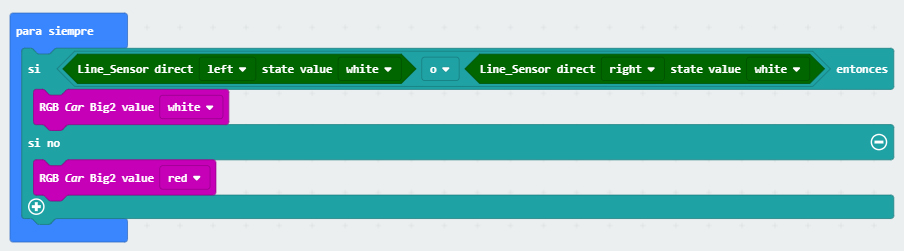
En esta sección encontraremos los bloques necesarios para la programación de los 3 LEDs RGB incorporados en el frontal del coche

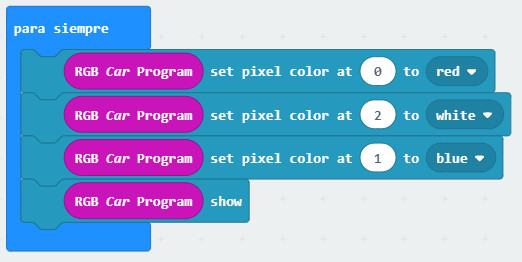
Dentro de la sección Mbit_robot encontraremos el bloque RGB Car Program que utilizaremos para gestionar los 3 LEDs RGB
Una vez configurado el color del LED RGB SMD, utilizaremos este bloque para encender el LED. No olvides incluir la estructura RGB Car Program en lugar de strip
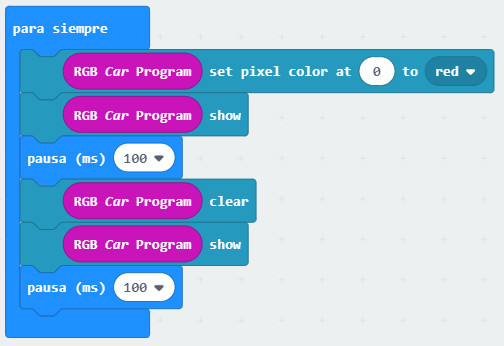
Apaga los LEDS RGB SMD de la estructura de LEDs RGB Car Program
En esta sección encontraremos los bloques necesarios para programar el coche microbit

Cambia el color de la luz de los dos RGB laterales. Pulsando en la flecha que hay junto a off, podremos seleccionar el color que queramos de entre los que se ofrecen. Si seleccionamos off, los leds se apagarán.