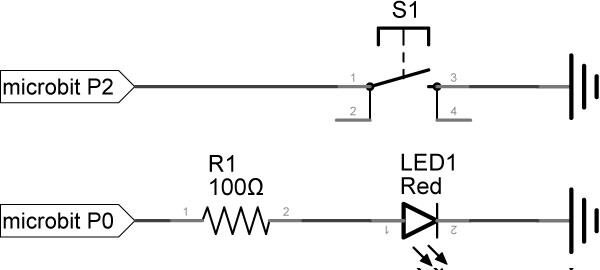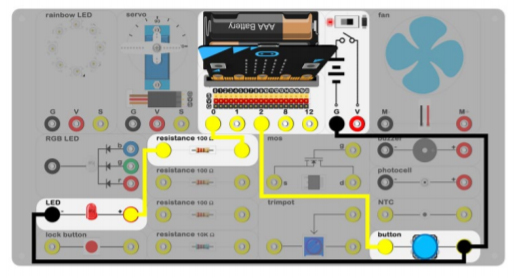
En esta práctica, se utiliza un interruptor para encender y apagar el motor
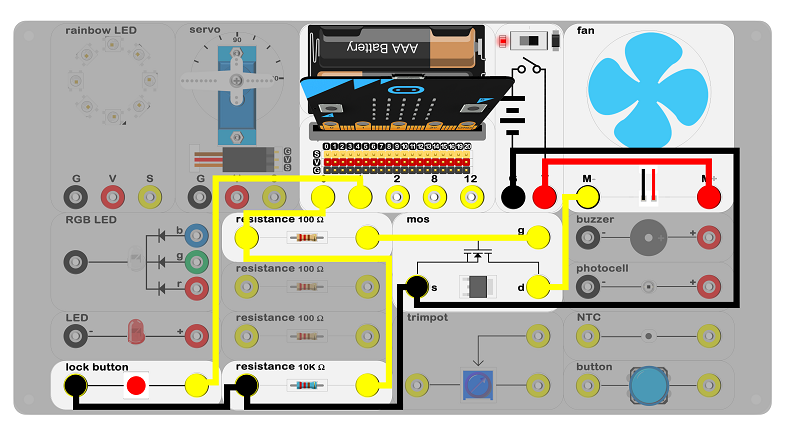
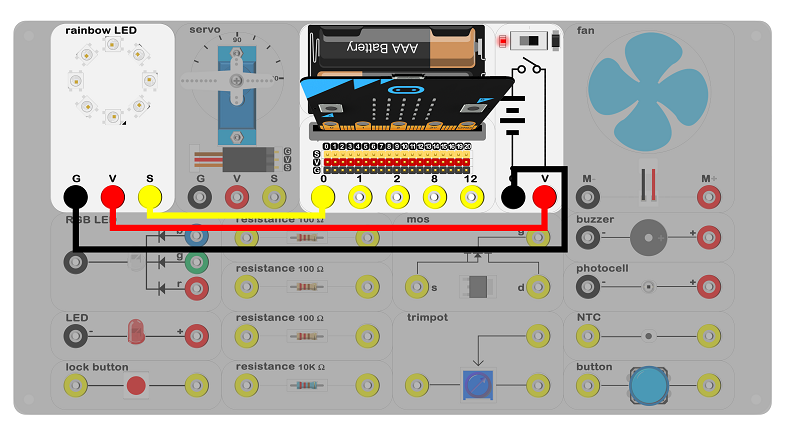
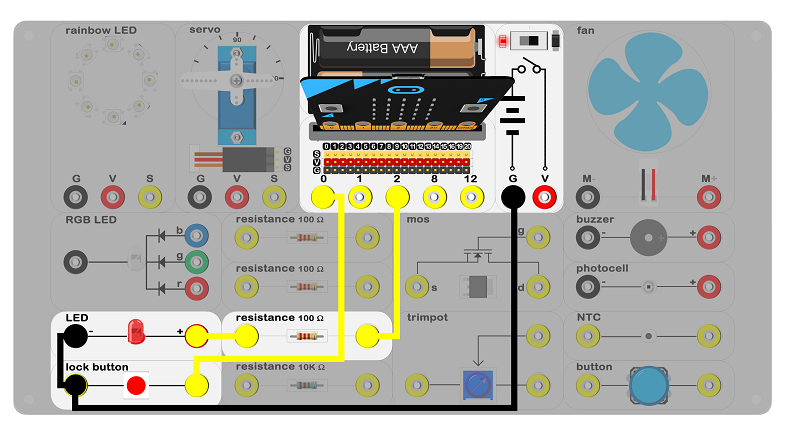
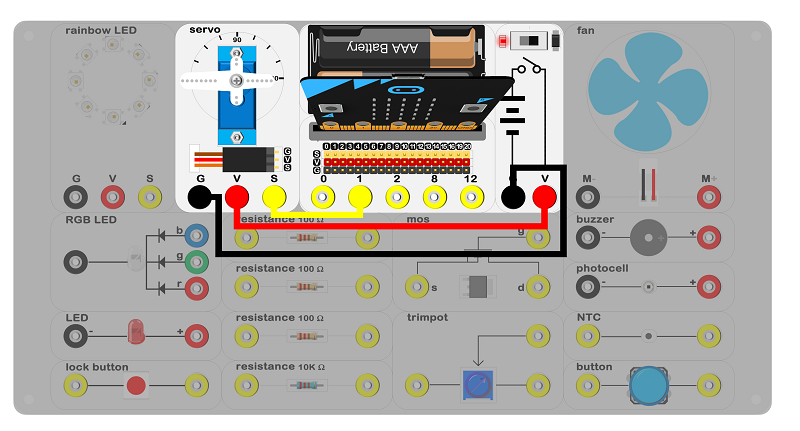
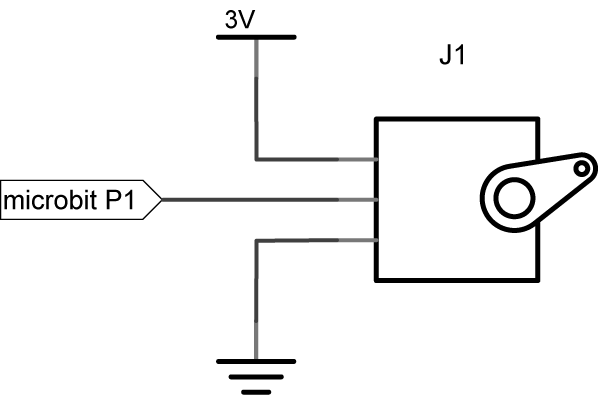
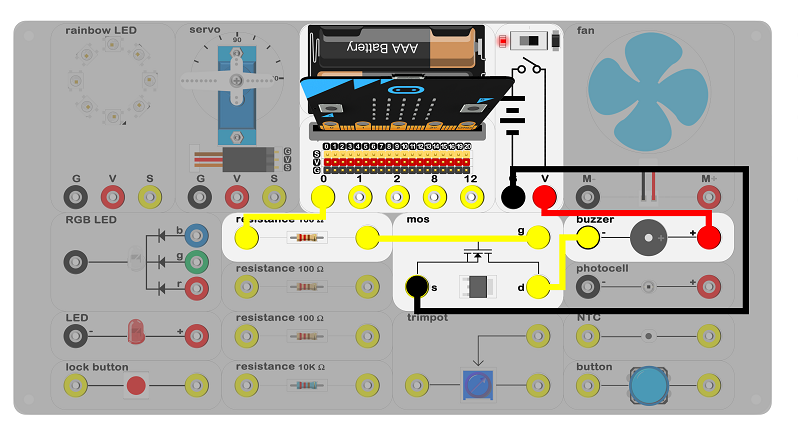
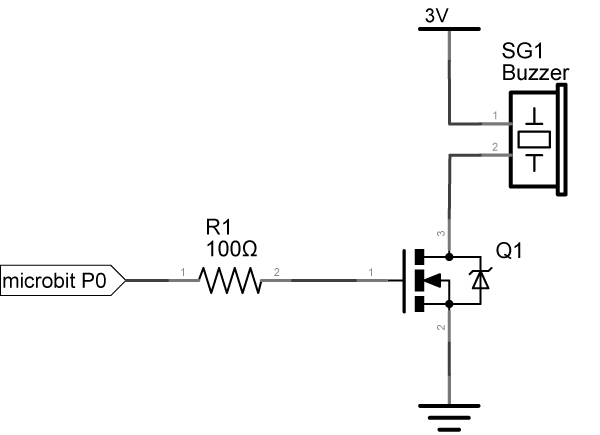
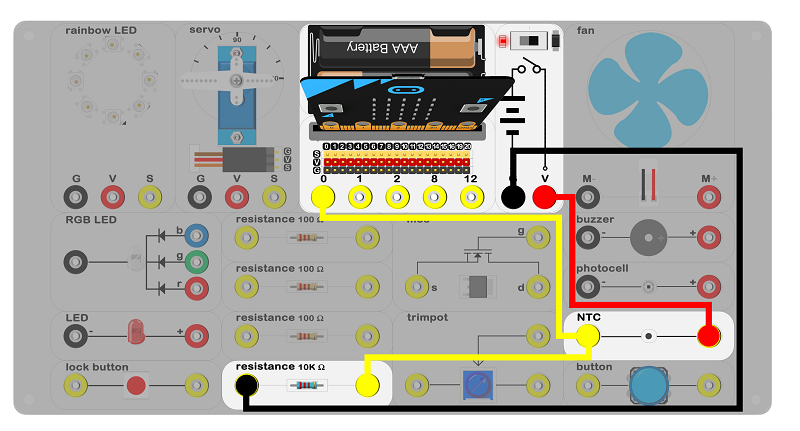
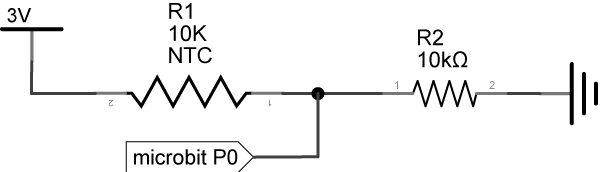
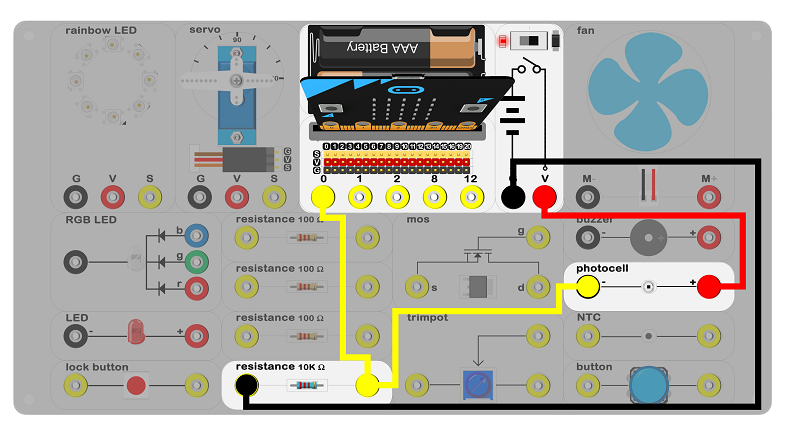
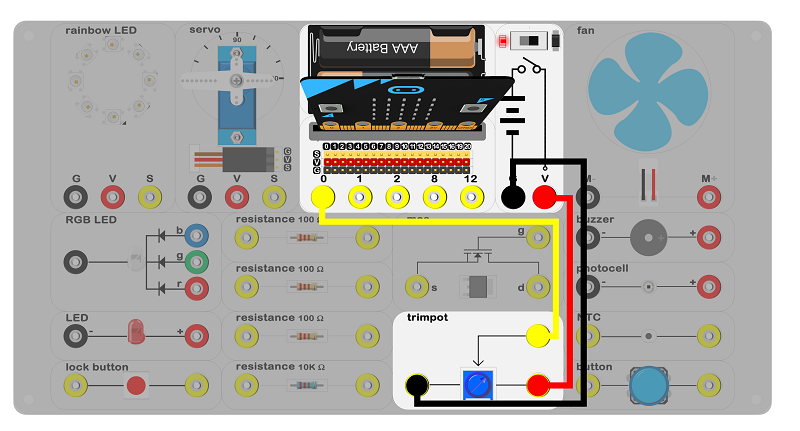
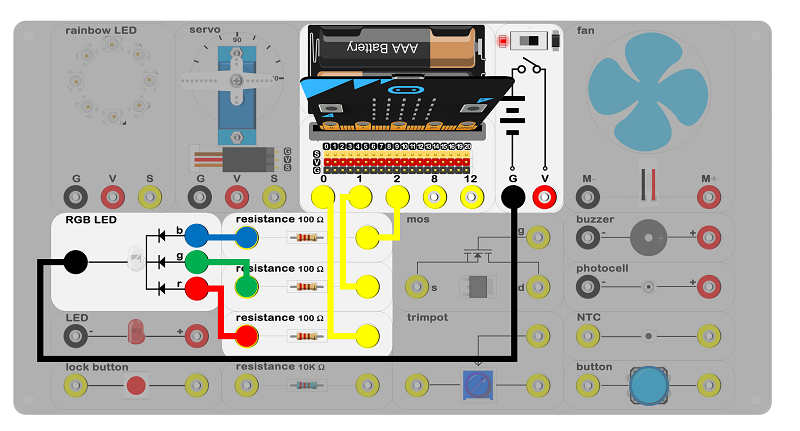
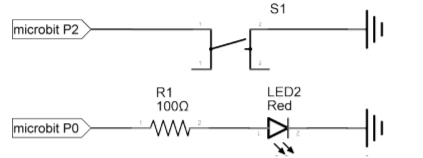
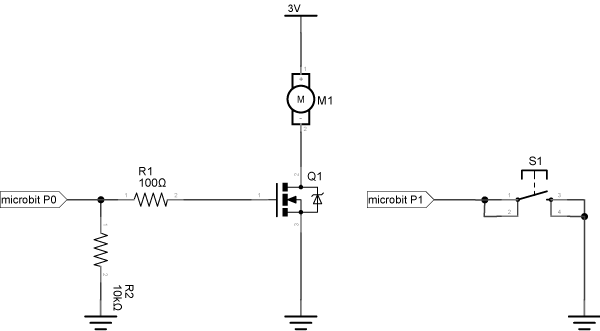
Conectar el circuito como en la imagen y colocar 2 baterías AAA en el portapilas.
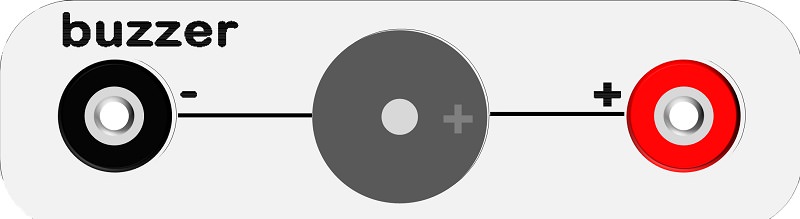
Un motor transforma la energía eléctrica en energía cinética mediante inducción electromagnética. Cuando se aplica voltaje en las conexiones del motor, el motor gira en un sentido, si se invierte la polaridad, cambia de sentido. Cuanto mayor sea el voltaje, más rápido será el giro
PROGRAMACIÓN
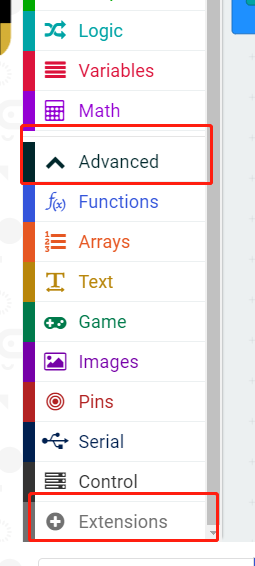
Entrar en makecode https://makecode.microbit.org/# Hacer clic en «Nuevo proyecto».
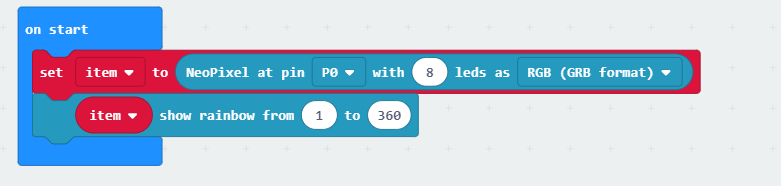
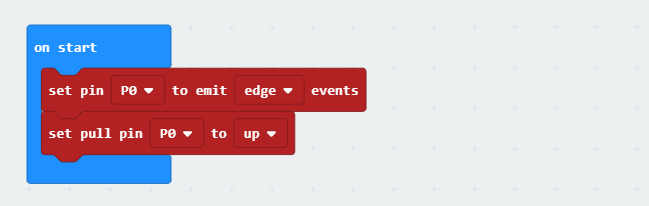
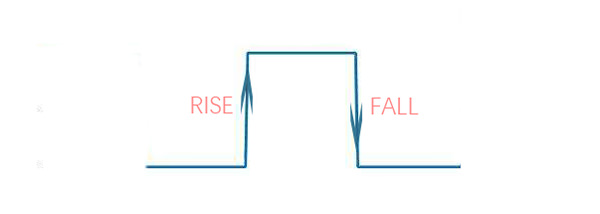
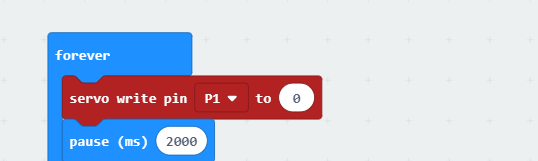
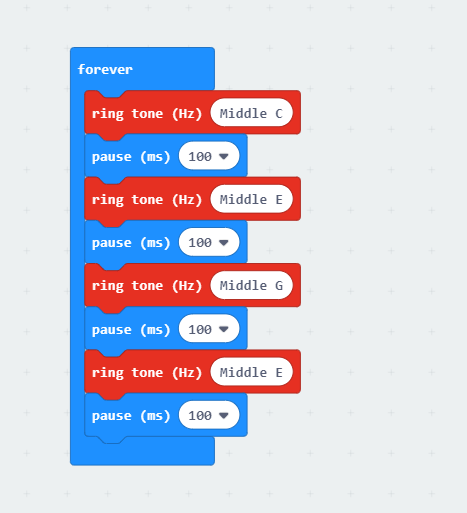
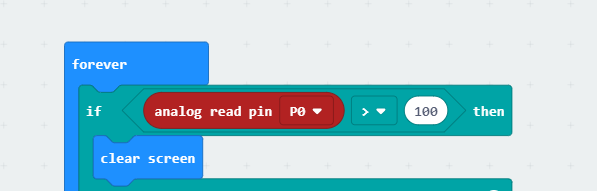
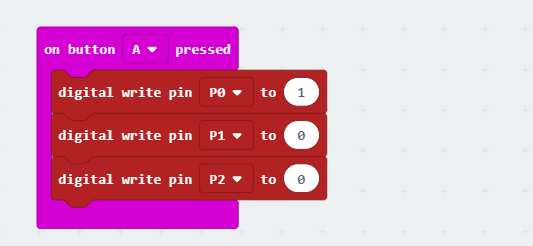
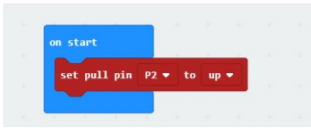
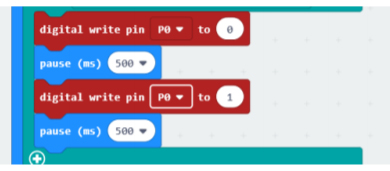
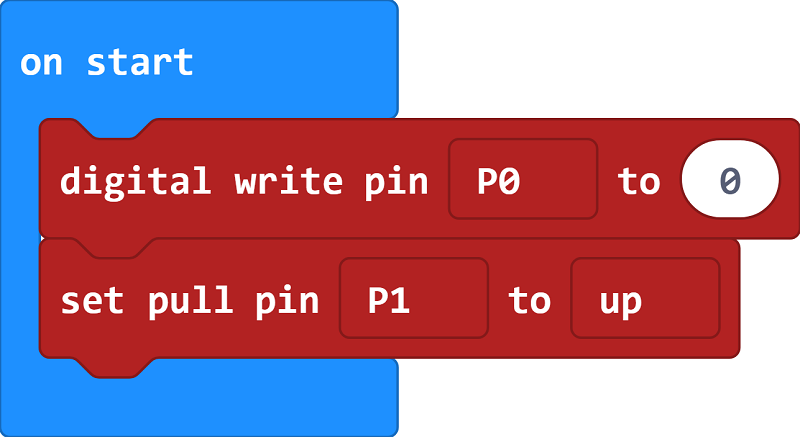
Dentro del bloque “al iniciar”, insertar los bloques “escritura digital” y “configurar pull”. Configurar P1 y P0 como se indica en la imagen
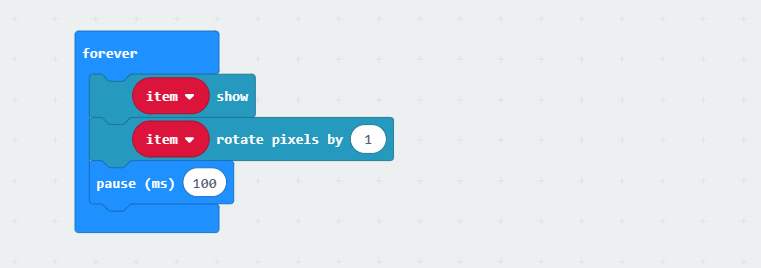
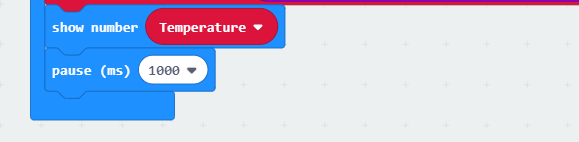
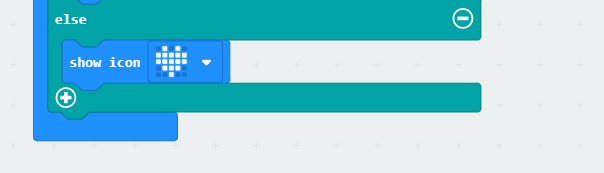
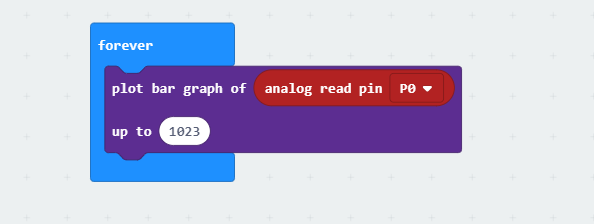
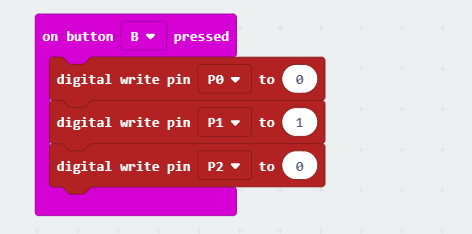
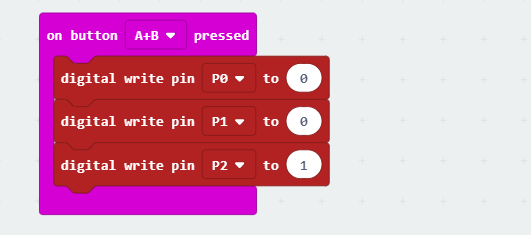
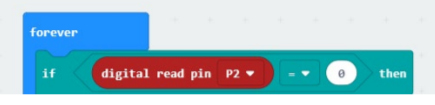
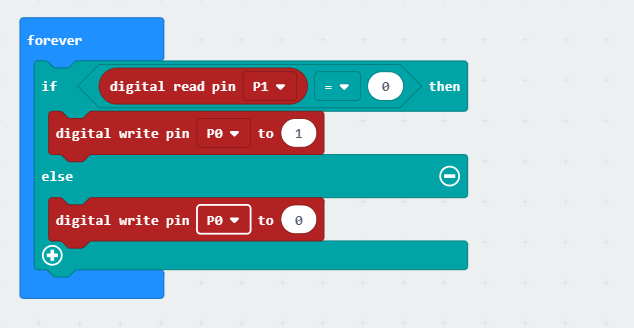
Dentro del bloque “para siempre” insertar el bloque “si – si no”. Si lo es, escribir 1 en el pin P0 para accionar el motor; si no lo es, escribir 0 en el pin P0 para detener el motor
Enlace del programa: https://makecode.microbit.org/_Y94cmyMePXsh
Al accionar el interruptor, el motor funciona; al presionar de nuevo, el motor se detiene