Realizamos un dispositivo capaz de controlar el acceso
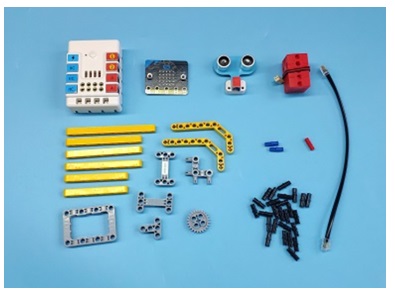
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Sensor ultrasonido
2 leds
3 Cable RJ11
Piezas Lego
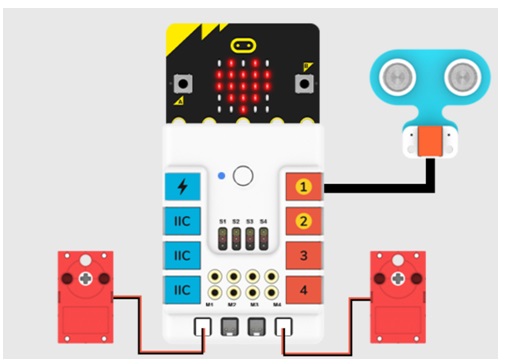
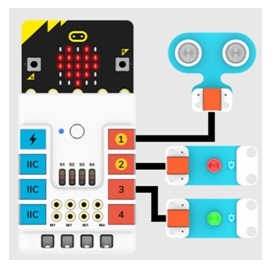
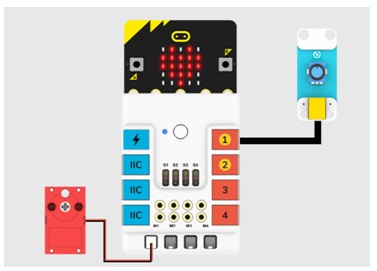
CIRCUITO DE CONEXIONES:
Conecta los leds, el sensor y la placa Micro:bit como se muestra en el siguiente esquema:
PROGRAMACIÓN:
Crea un nuevo proyecto en makecode y agrega las extensiones planetX y Nezha.
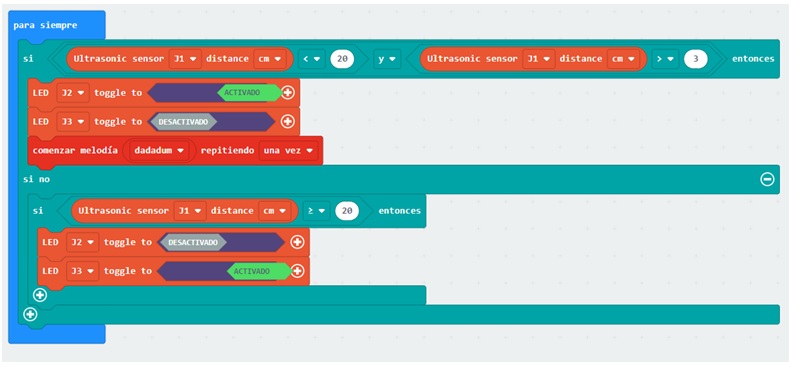
En un bucle infinito, realizamos la lectura del sensor ultrasonido. Si detecta un objeto cercano se ilumina el led rojo y suena una melodía. Si no hay un objeto cercano, se ilumina el led verde.
Pulsa en descargar y comprueba el funcionamiento del proyecto.
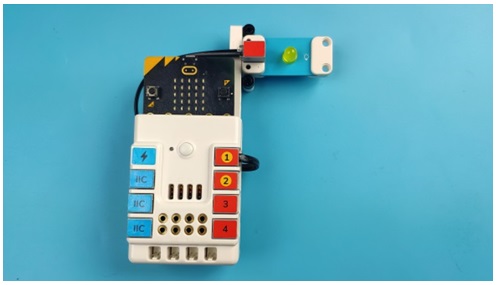
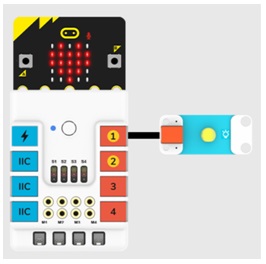
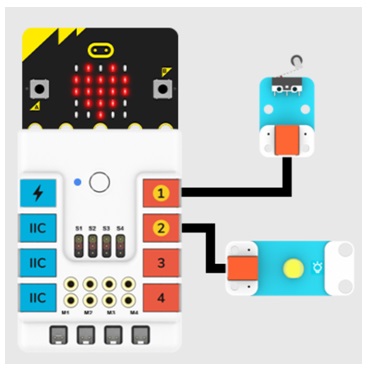
Creamos una pequeña lámpara de mesa que podremos encender y apagar utilizando el sensor de contacto formado por un final de carrera
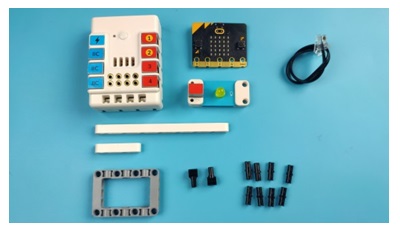
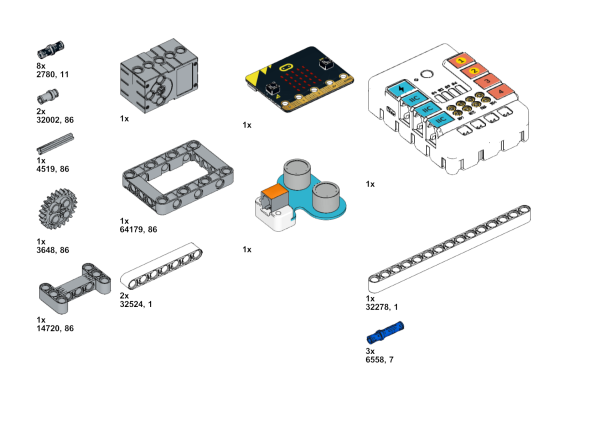
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Led
Sensor de contacto
2 Cables RJ11
Piezas Lego
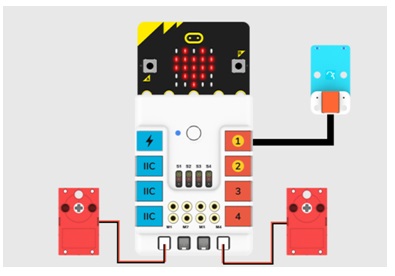
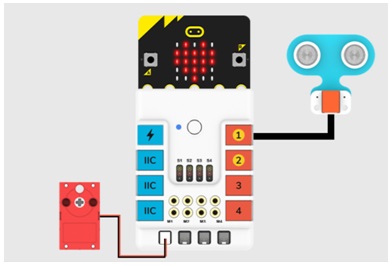
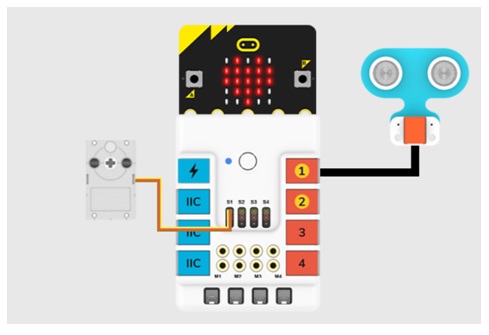
CIRCUITO DE CONEXIONES:
Conecta el sensor, el motor, y la placa Micro:bit como se muestra en el siguiente esquema:
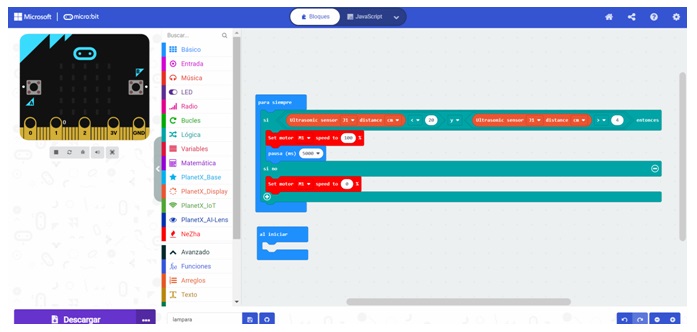
PROGRAMACIÓN:
Crea un nuevo proyecto en makecode y agrega las extensiones planetX y Nezha.
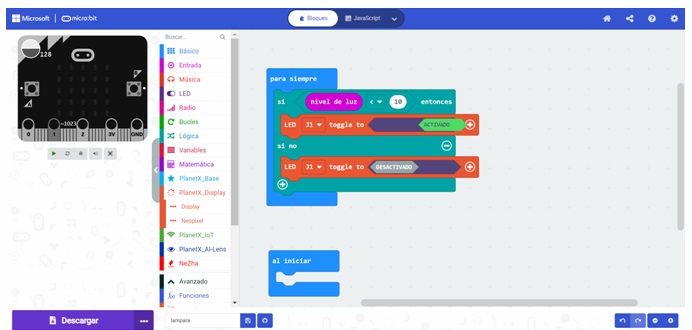
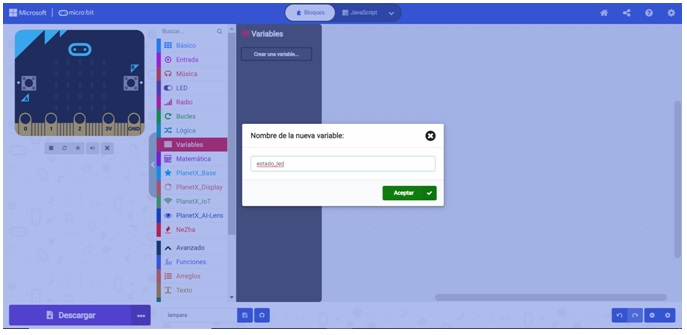
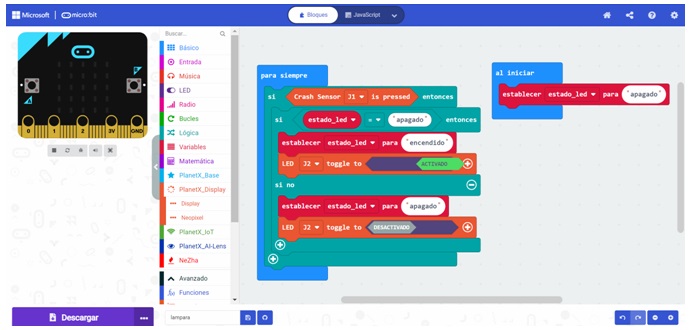
Creamos una variable para controlar si el led está encendido o apagado.
Cuando se presione el final de carrera
Si la variable contiene el valor “encendido”, procedemos a apagar el led y almacenar en la variable estado el valor “apagado”
Si la variable contiene el valor “apagado”, procedemos a encender el led y almacenar en la variable el valor “encendido”
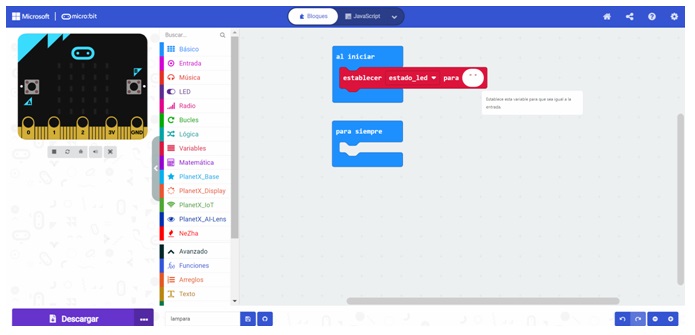
Para crear la variable, pulsa en variables, y asígnale un nombre, por ejemplo “estado_led”.
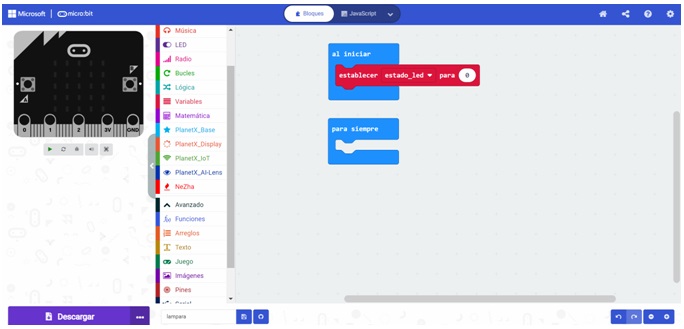
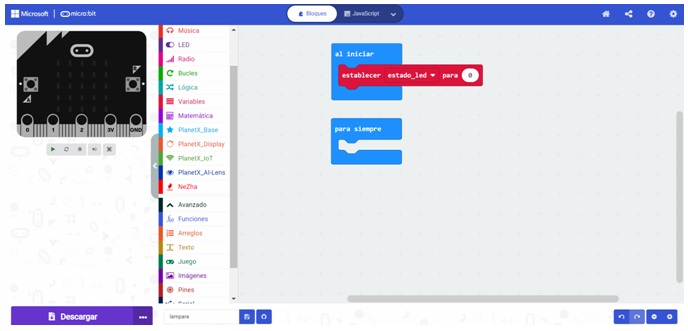
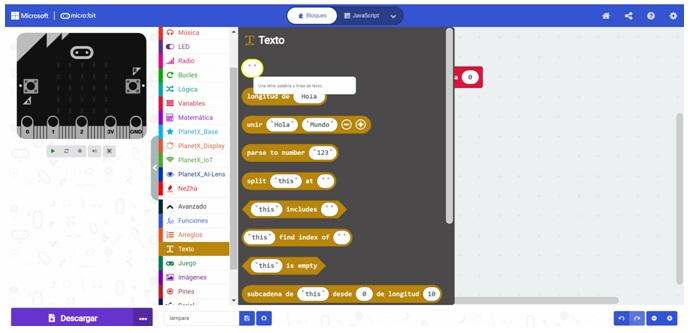
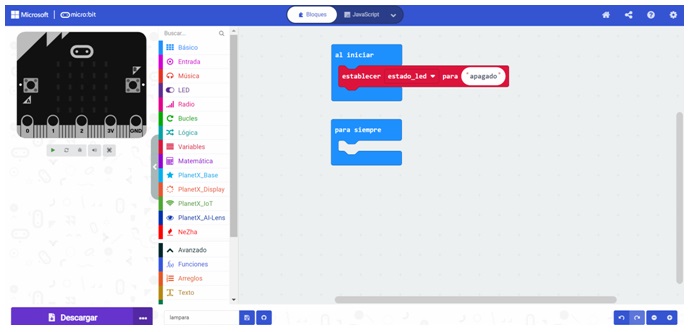
En el bloque “al iniciar”, establecemos el estado del como “apagado”. Para poder asignar a la variable un valor no numérico, arrastramos dentro del bloque establecer, el bloque “” que localizarás dentro de Texto:
En el bloque “al iniciar”, establecemos el estado del como “apagado”. Para poder asignar a la variable un valor no numérico, arrastramos dentro del bloque establecer, el bloque “” que localizarás dentro de Texto:
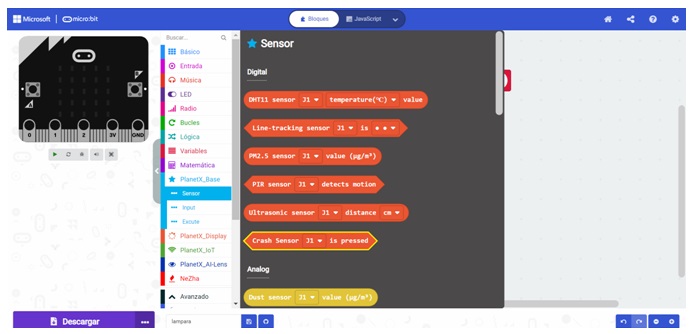
Para saber si se ha pulsado el final de carrera del sensor, utilizamos el bloque “Crash sensor” que localizarás en planetX_Base (Sensor)
Utilízalo dentro de un condicional para comprobar si se ha presionado. Después, con otro condicional, comprueba si el led está encendido o apagado y realiza la acción correspondiente sobre el led:
Pulsa en descargar, y comprueba que con el sensor puedes encender y apagar la lámpara.
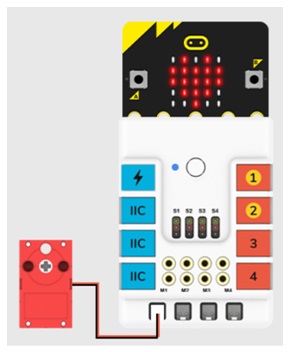
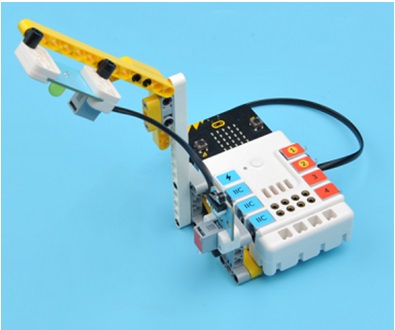
Realizamos una barrera de acceso que se abrirá cuando detecte la presencia de un vehículo.
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Servomotor
Sensor ultrasonido
1 Cable RJ11
Piezas Lego
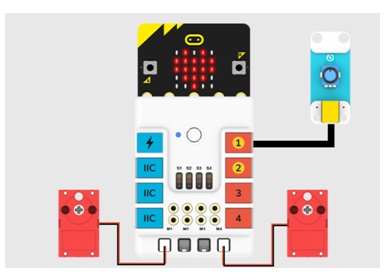
CIRCUITO DE CONEXIONES:
Conecta el sensor, el motor, y la placa Micro:bit como se muestra en el siguiente esquema:
PROGRAMACIÓN:
Crea un nuevo proyecto en makecode y agrega las extensiones planetX y Nezha.
El programa de este proyecto debe realizar las siguientes acciones:
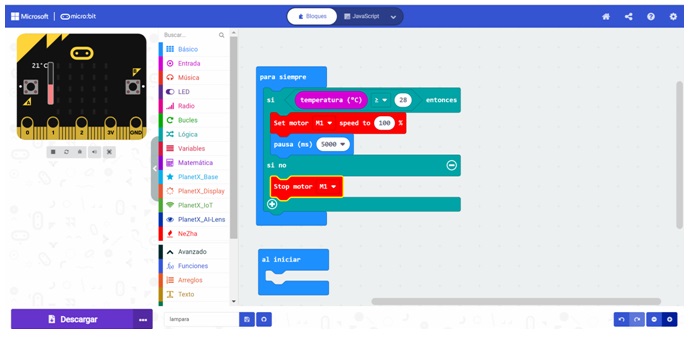
En un bucle infinito:
Realiza la lectura del sensor ultrasonido.
Si el sensor indica un valor entre 20 y 3cm mueve el motor y abre la barrera.
Si el valor está fuera del rango 20 – 3 cm, mueve el motor y cierra la barrera.
Al estar las órdenes dentro de un bucle infinito, se repite el ciclo continuamente.
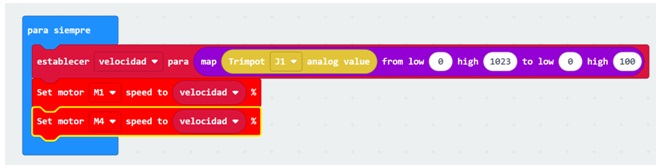
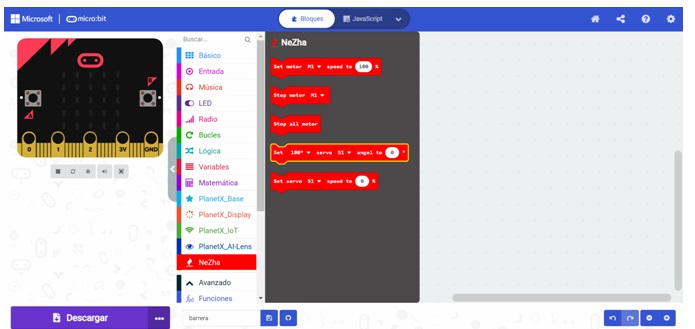
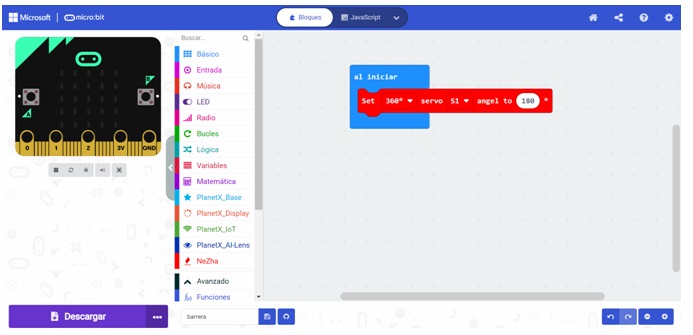
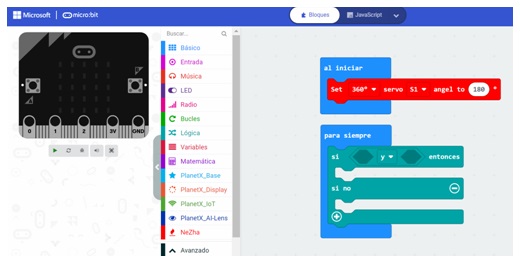
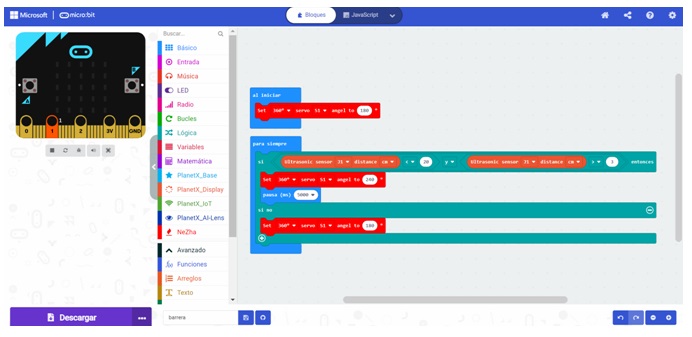
Al iniciar el programa, colocamos la barrera en posición de cerrado. Localizamos el bloque para mover el servomotor dentro de la sección Nezha.
Configuramos el bloque con los siguientes parámetros:
Tipo de servomotor: 360º
Conexión: pin S1
Ángulo de posición: 180º
Arrastramos el bloque dentro de “al iniciar” para que sea la primera acción a realizar.
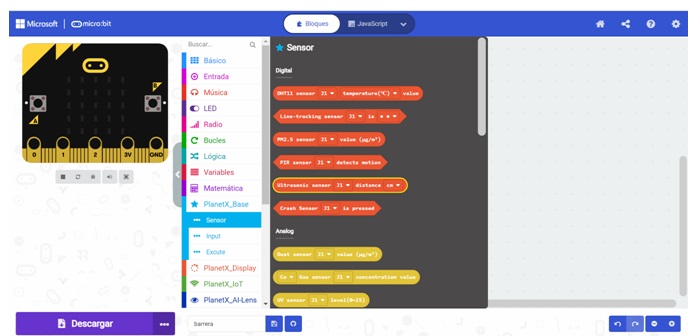
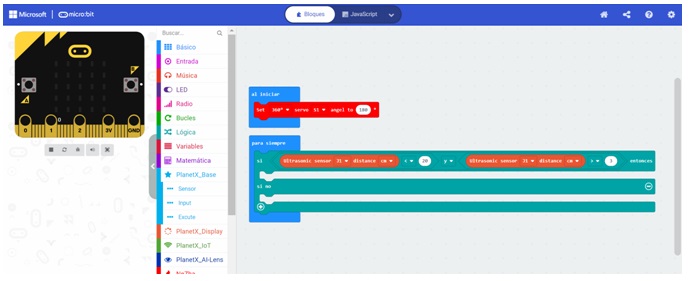
El bloque para la lectura del sensor ultrasonido lo encontrarás en planetX_base, dentro de los bloques de sensores (Ultrasonic sensor)
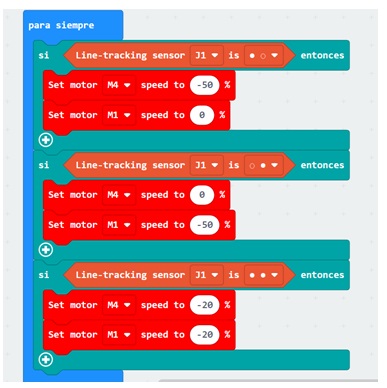
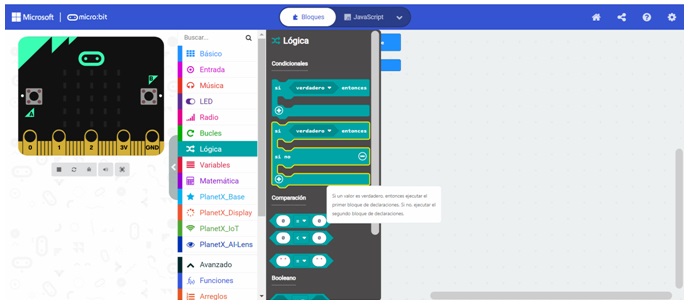
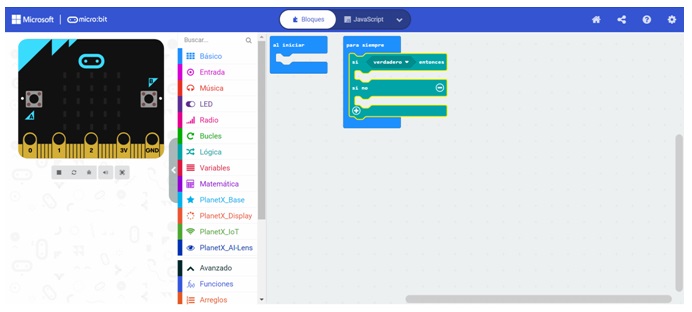
Para realizar la comparación de la lectura del sensor ultrasonido, pulsa en lógica y localiza el bloque “si…entonces…si no…”
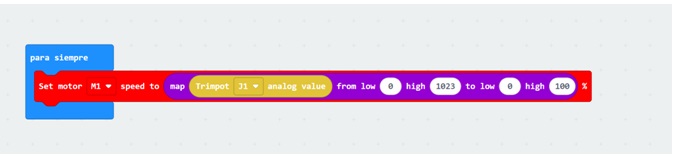
Arrastra el bloque dentro de “para siempre”
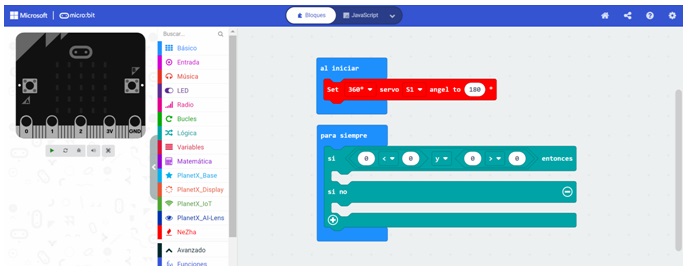
Para detectar un coche a una distancia entre 3 y 20 cms, tenemos que unir dos comparaciones utilizando el operador “y”. Pulsa en lógica y dentro de booleano localiza el operador “Y”. Arrástralo dentro de “verdadero”:
Con el operador “Y” unimos la comparación distancia > 3 y distancia < 20. Si pulsas en lógica localizarás el operador <. Arrástralo dentro de los hexágonos del operador “y”. Si pulsas sobre el comparador, podrás elegir < o >.
Completamos las comparaciones añadiendo la lectura del sensor ultrasonido y las distancias que queremos medir.
Solo queda agregar el movimiento del motor para abrir y cerrar la barrera:
Para probar la barrera, pulsa en descargar. Acerca un objeto a la barrera y comprueba que ésta se abre. Si alejar el objeto, ésta se cerrará.