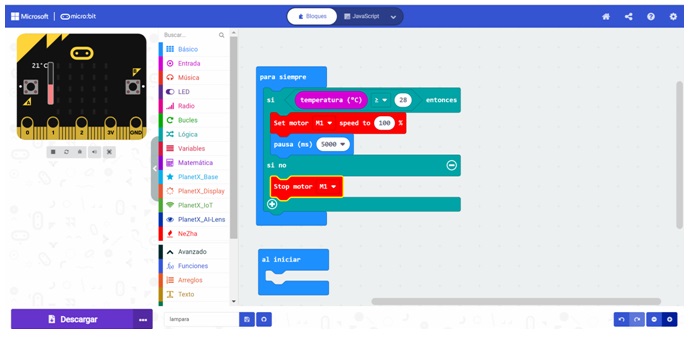
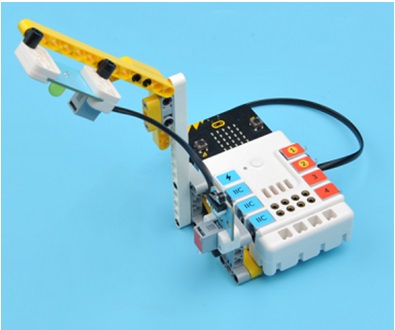
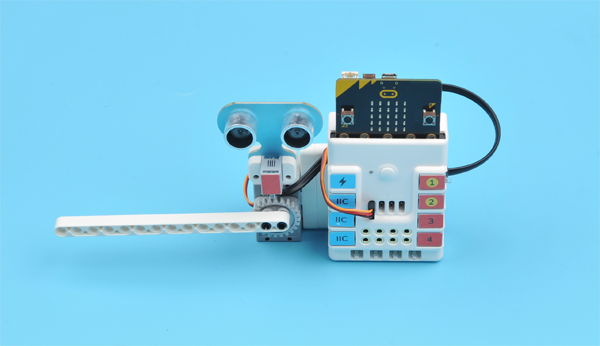
Creamos una pequeña lámpara de mesa que podremos encender y apagar utilizando el sensor de contacto formado por un final de carrera
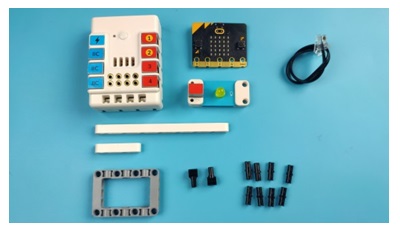
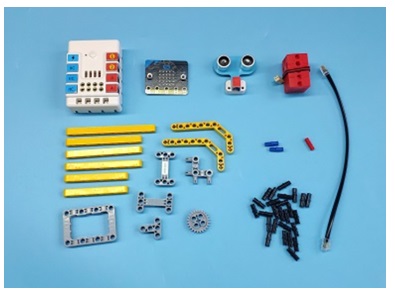
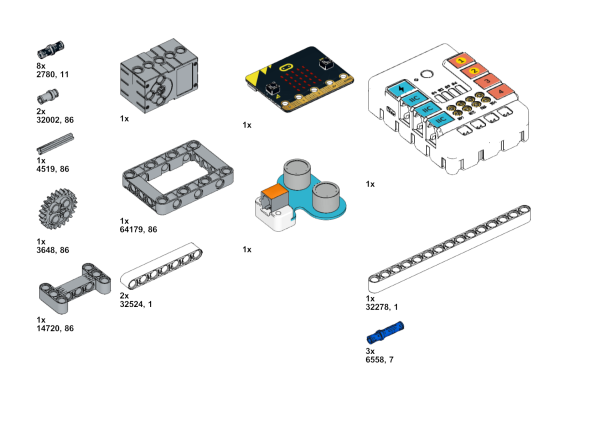
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Led
Sensor de contacto
2 Cables RJ11
Piezas Lego
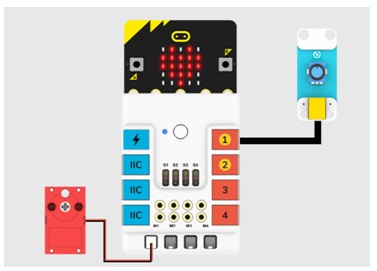
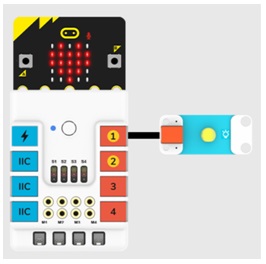
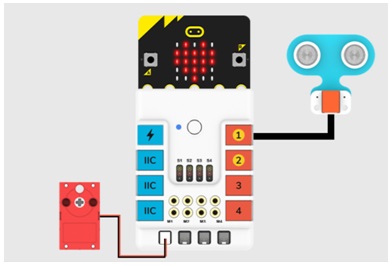
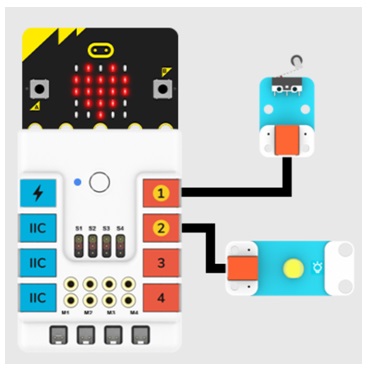
CIRCUITO DE CONEXIONES:
Conecta el sensor, el motor, y la placa Micro:bit como se muestra en el siguiente esquema:
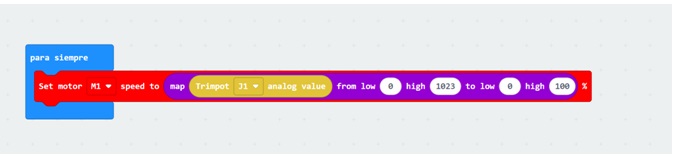
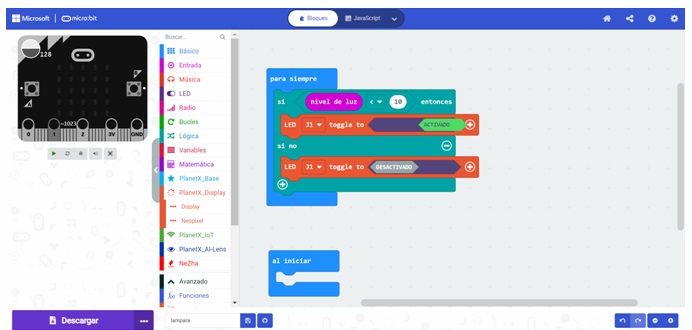
PROGRAMACIÓN:
Crea un nuevo proyecto en makecode y agrega las extensiones planetX y Nezha.
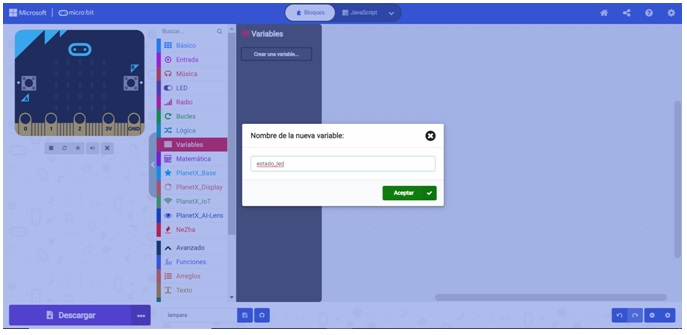
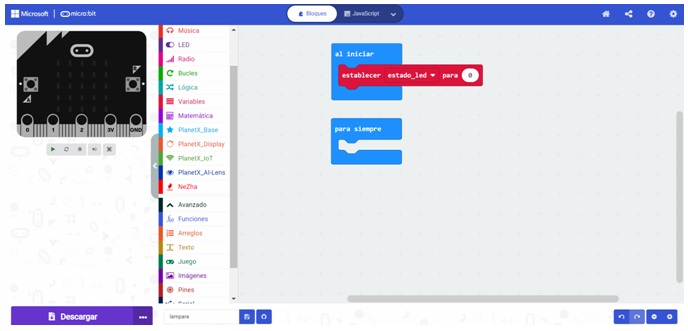
Creamos una variable para controlar si el led está encendido o apagado.
Cuando se presione el final de carrera
Si la variable contiene el valor “encendido”, procedemos a apagar el led y almacenar en la variable estado el valor “apagado”
Si la variable contiene el valor “apagado”, procedemos a encender el led y almacenar en la variable el valor “encendido”
Para crear la variable, pulsa en variables, y asígnale un nombre, por ejemplo “estado_led”.
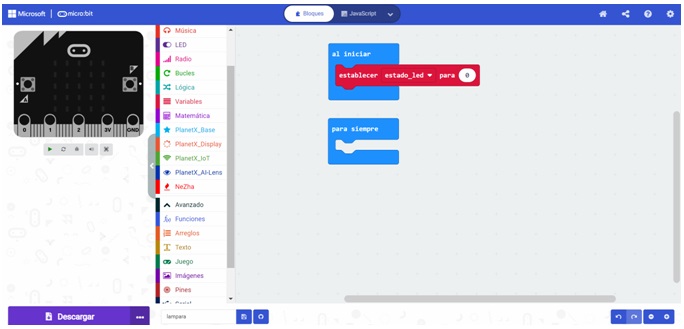
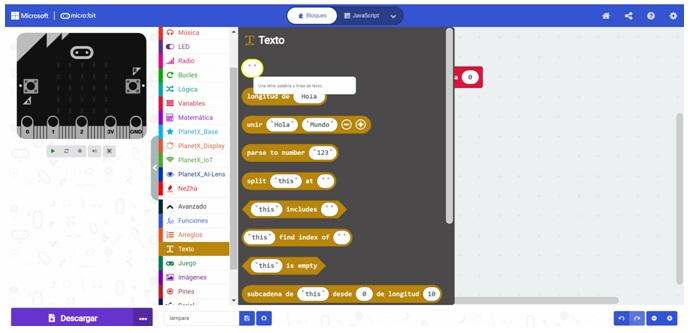
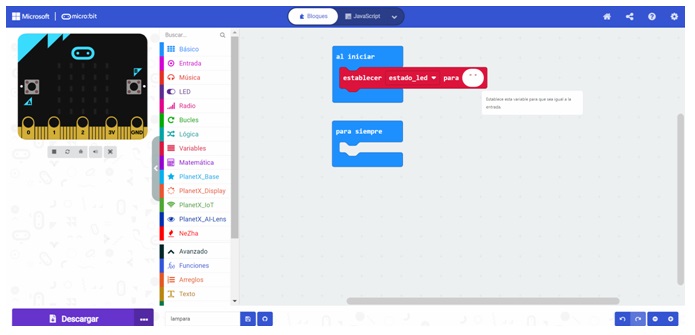
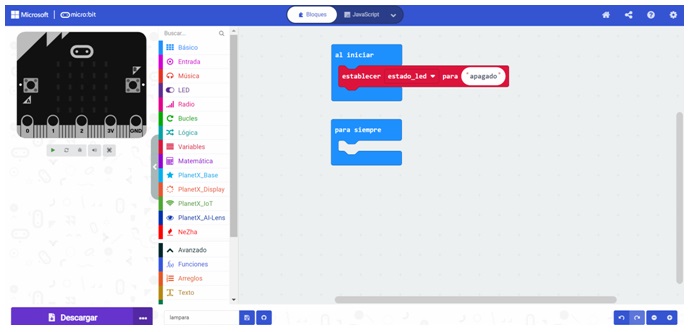
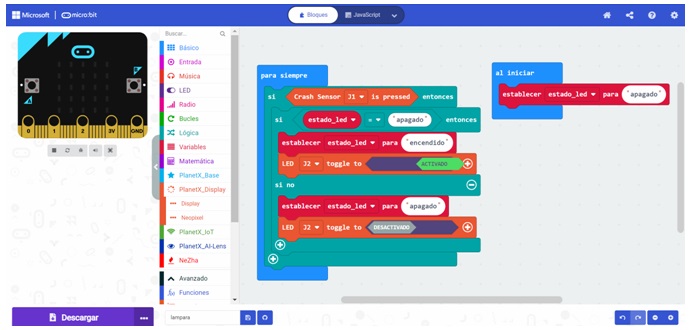
En el bloque “al iniciar”, establecemos el estado del como “apagado”. Para poder asignar a la variable un valor no numérico, arrastramos dentro del bloque establecer, el bloque “” que localizarás dentro de Texto:
En el bloque “al iniciar”, establecemos el estado del como “apagado”. Para poder asignar a la variable un valor no numérico, arrastramos dentro del bloque establecer, el bloque “” que localizarás dentro de Texto:
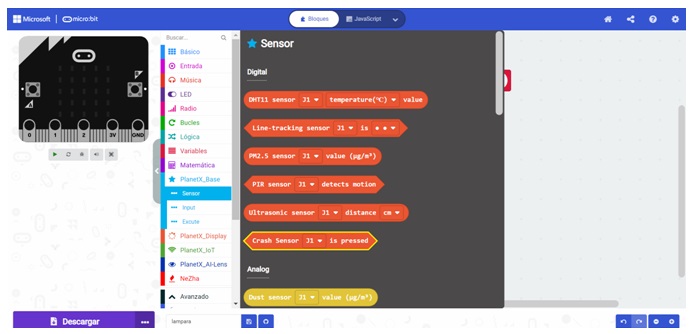
Para saber si se ha pulsado el final de carrera del sensor, utilizamos el bloque “Crash sensor” que localizarás en planetX_Base (Sensor)
Utilízalo dentro de un condicional para comprobar si se ha presionado. Después, con otro condicional, comprueba si el led está encendido o apagado y realiza la acción correspondiente sobre el led:
Pulsa en descargar, y comprueba que con el sensor puedes encender y apagar la lámpara.
Realizamos una barrera de acceso que se abrirá cuando detecte la presencia de un vehículo.
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Servomotor
Sensor ultrasonido
1 Cable RJ11
Piezas Lego
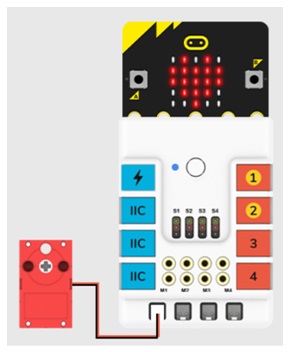
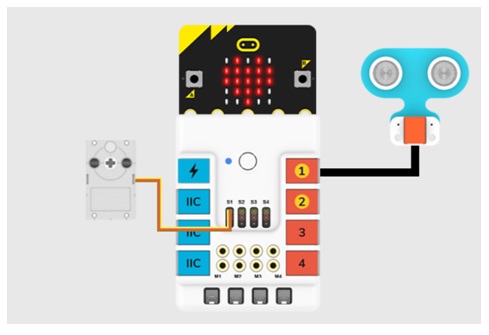
CIRCUITO DE CONEXIONES:
Conecta el sensor, el motor, y la placa Micro:bit como se muestra en el siguiente esquema:
PROGRAMACIÓN:
Crea un nuevo proyecto en makecode y agrega las extensiones planetX y Nezha.
El programa de este proyecto debe realizar las siguientes acciones:
En un bucle infinito:
Realiza la lectura del sensor ultrasonido.
Si el sensor indica un valor entre 20 y 3cm mueve el motor y abre la barrera.
Si el valor está fuera del rango 20 – 3 cm, mueve el motor y cierra la barrera.
Al estar las órdenes dentro de un bucle infinito, se repite el ciclo continuamente.
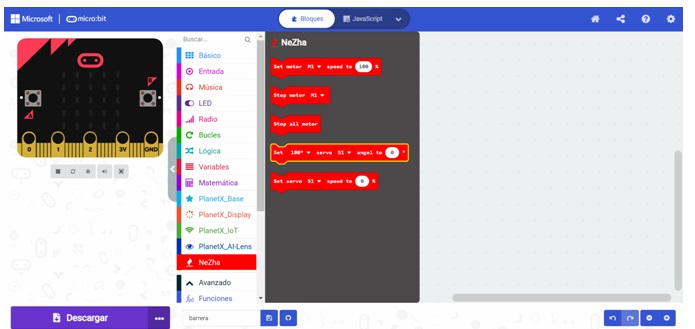
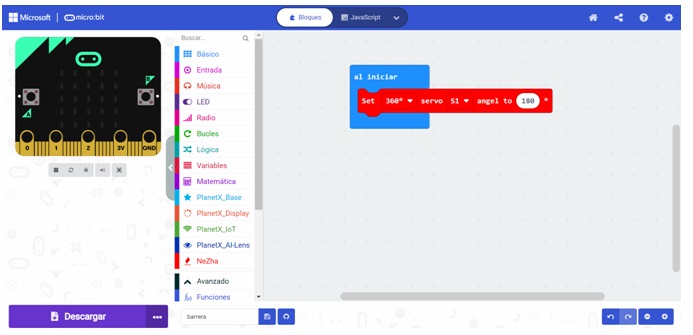
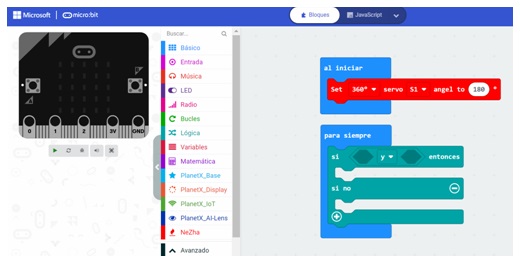
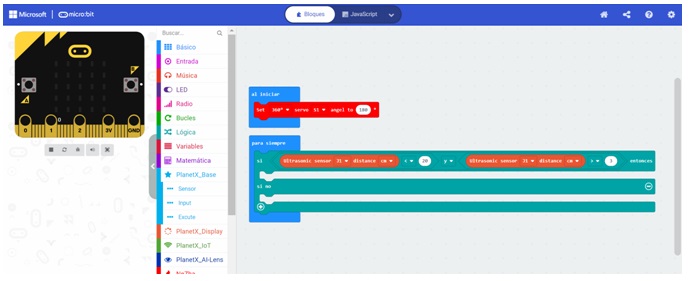
Al iniciar el programa, colocamos la barrera en posición de cerrado. Localizamos el bloque para mover el servomotor dentro de la sección Nezha.
Configuramos el bloque con los siguientes parámetros:
Tipo de servomotor: 360º
Conexión: pin S1
Ángulo de posición: 180º
Arrastramos el bloque dentro de “al iniciar” para que sea la primera acción a realizar.
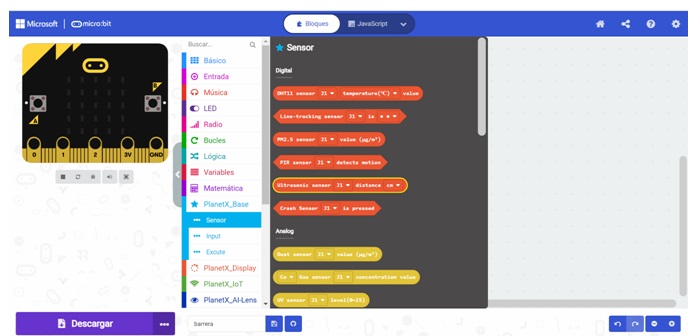
El bloque para la lectura del sensor ultrasonido lo encontrarás en planetX_base, dentro de los bloques de sensores (Ultrasonic sensor)
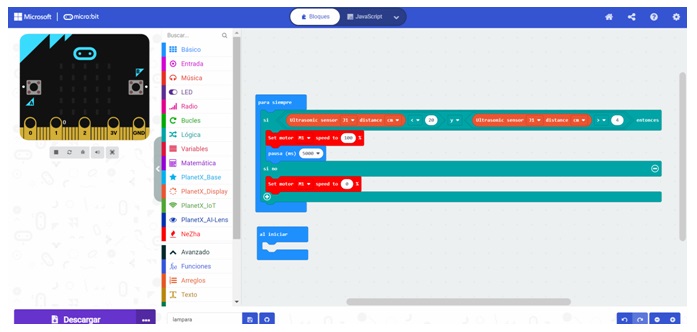
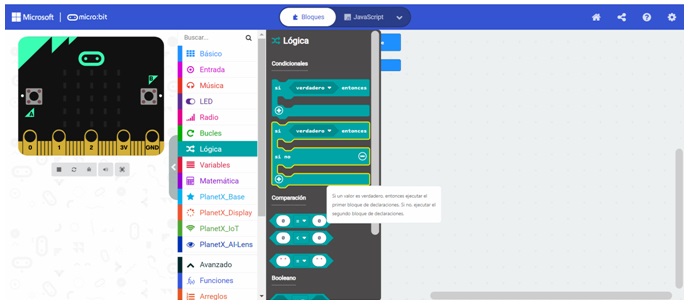
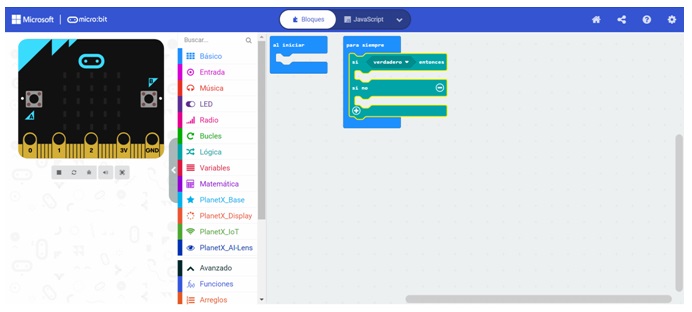
Para realizar la comparación de la lectura del sensor ultrasonido, pulsa en lógica y localiza el bloque “si…entonces…si no…”
Arrastra el bloque dentro de “para siempre”
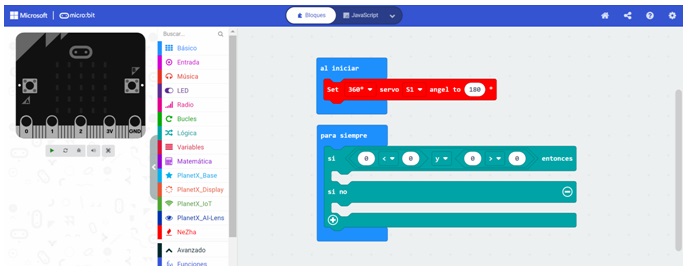
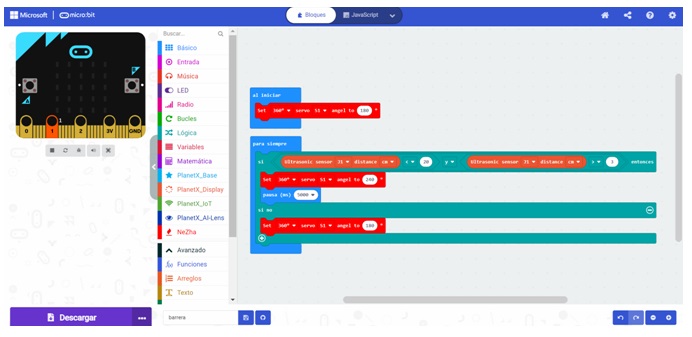
Para detectar un coche a una distancia entre 3 y 20 cms, tenemos que unir dos comparaciones utilizando el operador “y”. Pulsa en lógica y dentro de booleano localiza el operador “Y”. Arrástralo dentro de “verdadero”:
Con el operador “Y” unimos la comparación distancia > 3 y distancia < 20. Si pulsas en lógica localizarás el operador <. Arrástralo dentro de los hexágonos del operador “y”. Si pulsas sobre el comparador, podrás elegir < o >.
Completamos las comparaciones añadiendo la lectura del sensor ultrasonido y las distancias que queremos medir.
Solo queda agregar el movimiento del motor para abrir y cerrar la barrera:
Para probar la barrera, pulsa en descargar. Acerca un objeto a la barrera y comprueba que ésta se abre. Si alejar el objeto, ésta se cerrará.
Realizamos un sistema que nos indique si la tierra de una planta está húmeda o si necesita ser regada
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Led Rojo
Led Verde
Sensor de humedad
3 Cables RJ11
Piezas Lego
CIRCUITO DE CONEXIONES:
Conecta los leds, el sensor y la placa Micro:bit como se muestra en el siguiente esquema:
PROGRAMACIÓN:
Crea un nuevo proyecto en makecode y agrega las extensiones planetX y Nezha.
El programa de este proyecto debe realizar las siguientes acciones:
En un bucle infinito:
Realiza la lectura del sensor de humedad.
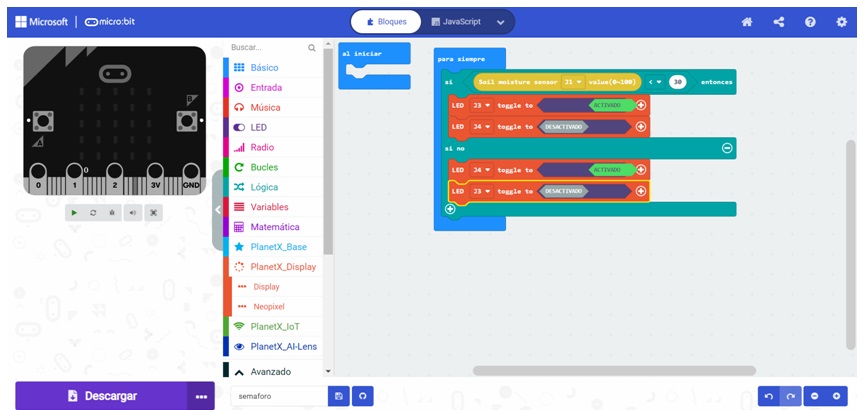
Si el sensor indica un valor inferior a 30, enciende el led rojo por falta de humedad
Si el sensor indica un valor superior a 30, enciende el led verde.
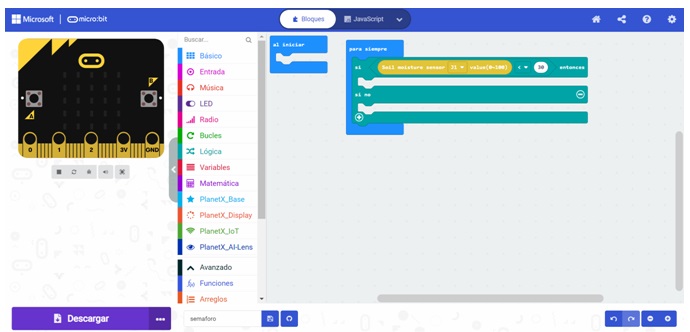
Al estar las órdenes dentro de un bucle infinito, se repite el ciclo continuamente El bloque para la lectura del sensor de humedad lo encontrarás en planetX_base, dentro de los bloques de sensores (Soil moisture sensor)
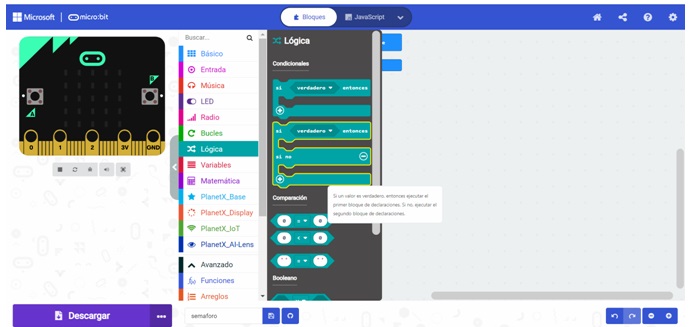
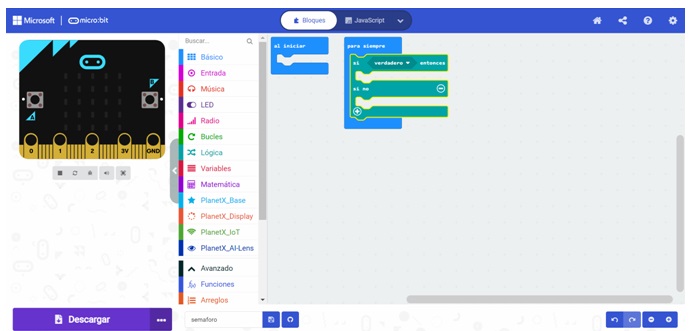
Para realizar la comparación de la lectura del sensor de humedad, pulsa en lógica y localiza el bloque “si…entonces…si no…”
Arrastra el bloque dentro de “para siempre”
Para crear la condición, pulsa sobre lógica y localiza el operador <. Arrastra el operador sobre “verdadero” en el bloque “si… entonces”. A la izquierda del operador, introduce el bloque de lectura del sensor y a la derecha el valor de comparación (30). Selecciona dentro del bloque de lectura del sensor la conexión J2.
Si la condición es correcta, se enciende el led rojo y en caso contrario el led verde:
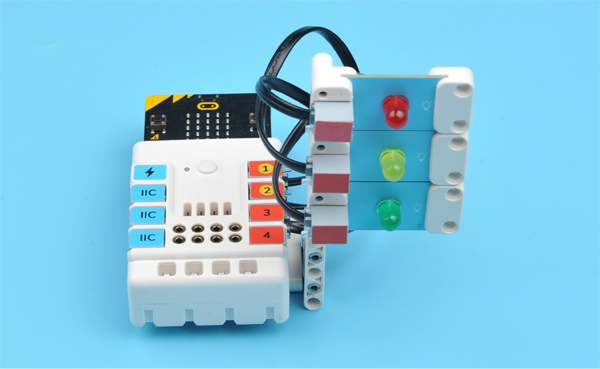
Realizamos un semáforo que enciende sus leds siguiendo el orden verde – amarillo – rojo.
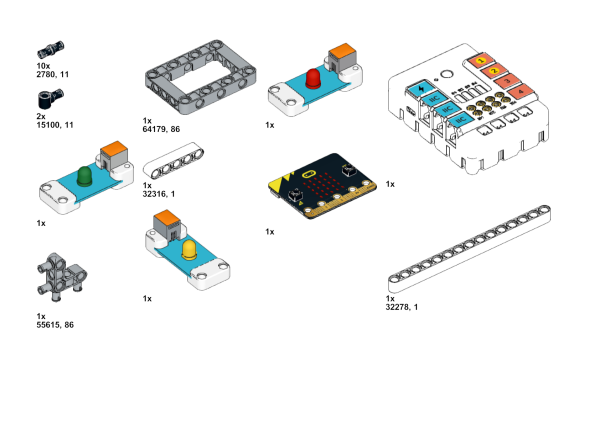
LISTA DE MATERIALES:
Módulo de conexiones Nezha
Placa Micro:bit
Led Rojo
Led Verde
Led Amarillo
3 Cables RJ11
Piezas Lego
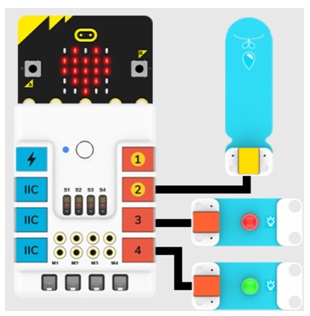
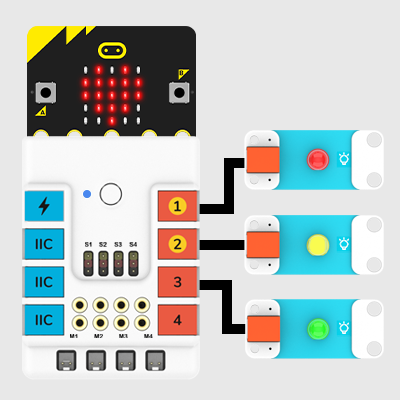
Conecta los leds y la placa Micro:bit como se muestra en el siguiente esquema:
Nezha: Conexiones semáforo
PROGRAMACIÓN:
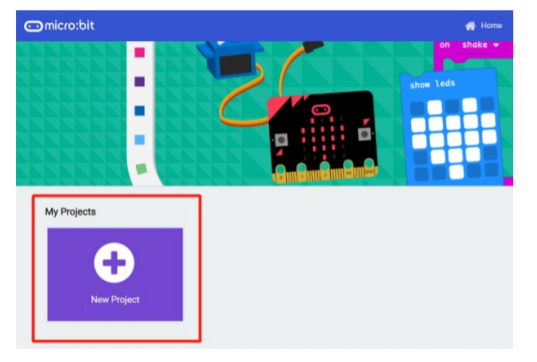
Accede a la web https://makecode.microbit.org/ y pulsa en crear nuevo proyecto. Asígnale un nombre al proyecto y pulsa en crear.
Una vez dentro de makecode, pulsa en el icono del engrane (arriba a la derecha)
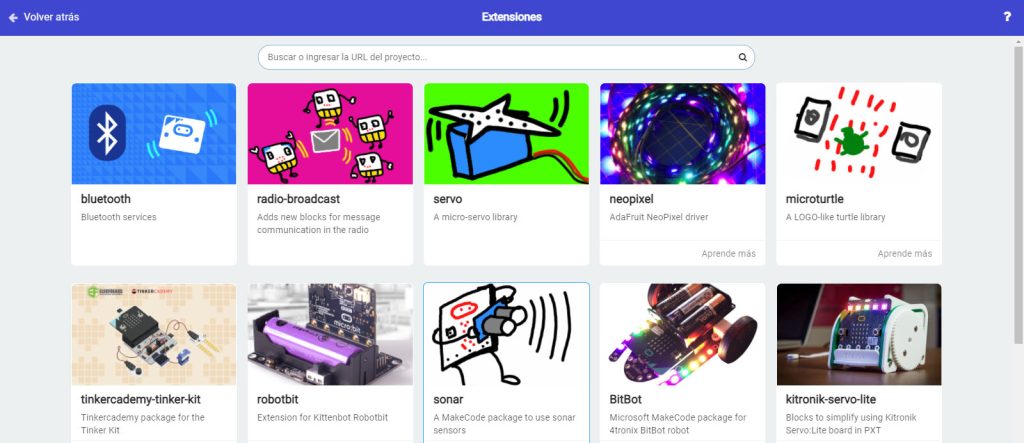
En el menú que se ha desplegado, selecciona la opción “extensiones”
Microbit – extensiones
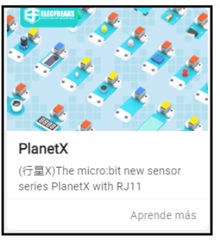
En el cuadro de búsqueda introduce PlanetX y pulsa la lupa. Encontrarás la siguiente extensión:
Sensores PlanetX
Pulsa sobre la extensión y automáticamente se añadirán nuevos bloques a tu proyecto que podrás utilizar para controlar los sensores de Nezha
Realiza los mismos pasos para añadir la extensión Nezha y tendrás tu espacio listo para empezar a programar. En cada proyecto que realices con nezha, debes seguir estos pasos para poder utilizar los bloques de programación adecuados a este kit.
El programa de este proyecto debe realizar las siguientes acciones:
En un bucle infinito:
Enciende el led verde
Realiza una pausa (para mantener el led encendido unos segundos)
Apaga el led verde
Enciende el led amarillo
Realiza una pausa (para mantener el led encendido unos segundos)
Apaga el led amarillo
Enciende el led rojo
Realiza una pausa (para mantener el led encendido unos segundos)
Apaga el led rojo
Al estar las órdenes dentro de un bucle infinito, se repite el ciclo continuamente
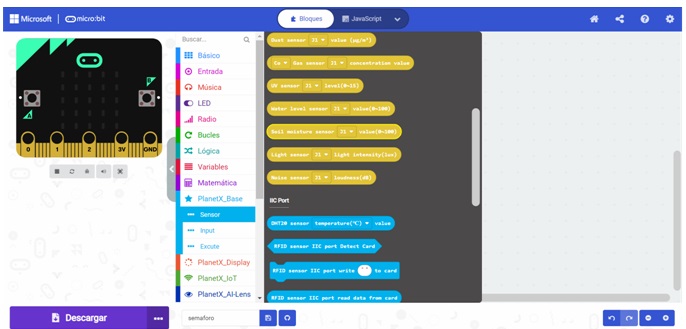
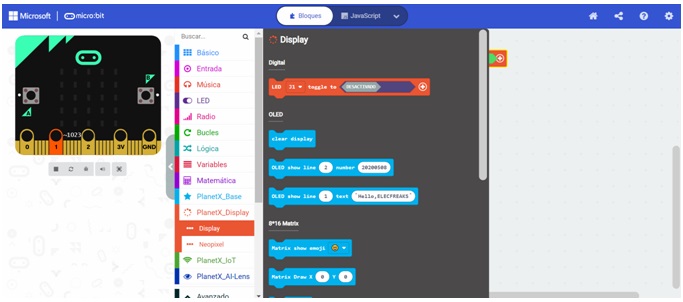
Para localizar el bloque que enciende y apaga los leds, pulsa en PlanetX_Display.
Pulsa sobre la extensión y automáticamente se añadirán nuevos bloques a tu proyecto que podrás utilizar para controlar los sensores de Nezha
Realiza los mismos pasos para añadir la extensión Nezha y tendrás tu espacio listo para empezar a programar. En cada proyecto que realices con nezha, debes seguir estos pasos para poder utilizar los bloques de programación adecuados a este kit.
El programa de este proyecto debe realizar las siguientes acciones:
En un bucle infinito:
Enciende el led verde
Realiza una pausa (para mantener el led encendido unos segundos)
Apaga el led verde
Enciende el led amarillo
Realiza una pausa (para mantener el led encendido unos segundos)
Apaga el led amarillo
Enciende el led rojo
Realiza una pausa (para mantener el led encendido unos segundos)
Apaga el led rojo
Al estar las órdenes dentro de un bucle infinito, se repite el ciclo continuamente
Para localizar el bloque que enciende y apaga los leds, pulsa en PlanetX_Display.
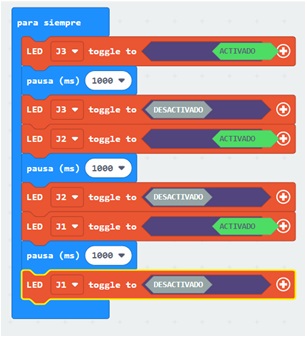
A continuación pulsa en Display y localiza el siguiente bloque:
J1 Activado / Desactivado – Enciende / Apaga el Led verde
J2 Activado / Desactivado – Enciende / Apaga el Led amarillo
J3 Activado / Desactivado – Enciende / Apaga el Led rojo
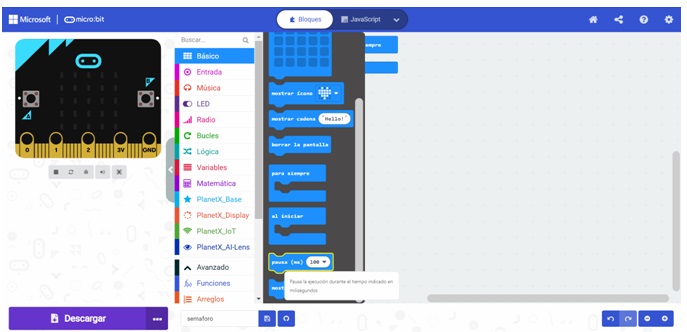
Si pulsas en básico, localizarás el bloque para realizar una pausa:
Arrastrando estos bloques dentro del bucle “para siempre” creamos el siguiente código:
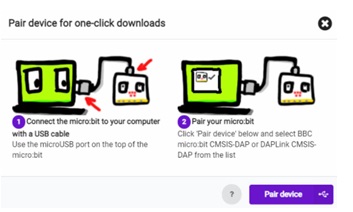
Para probar el programa, emparejamos la placa Micro:bit con el sistema. De esta forma los programas se cargarán en la placa con solo pulsar un botón. En la pantalla de makecode verás que abajo a la izquierda hay un botón morado llamado «descargar». Al lado tienes un icono con 3 puntos (…). Pulsa sobre los 3 puntos:
Aparece un pequeño menú, pulsa sobre «emparejar» o «pair device» y verás la siguiente pantalla.
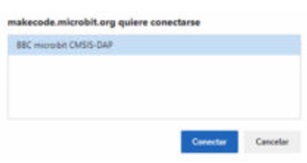
Si no tenías conectada la placa al PC a través del cable USB, conéctala y pulsa en «emparejar» o «pair device». Se mostrará la siguiente pantalla:
Haz clic con el ratón sobre la placa microbit, y pulsa en conectar. A partir de ahora la placa quedará emparejada al ordenador durante toda la sesión de trabajo.
Para guardar el programa en la placa, pulsa el botón morado descargar, abajo a la izquierda. El programa se descargará directamente a la placa microbit y verás funcionar el semáforo.
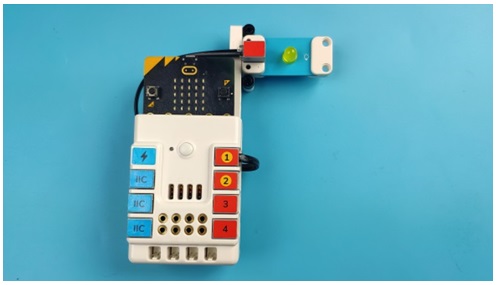
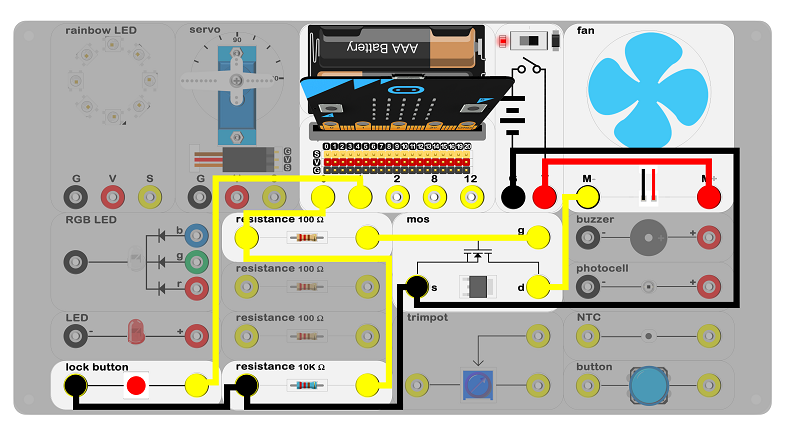
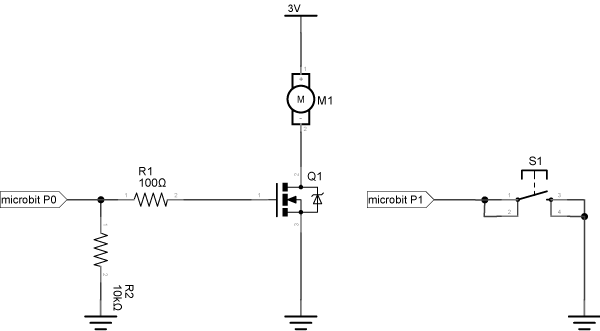
En esta práctica, se utiliza un interruptor para encender y apagar el motor
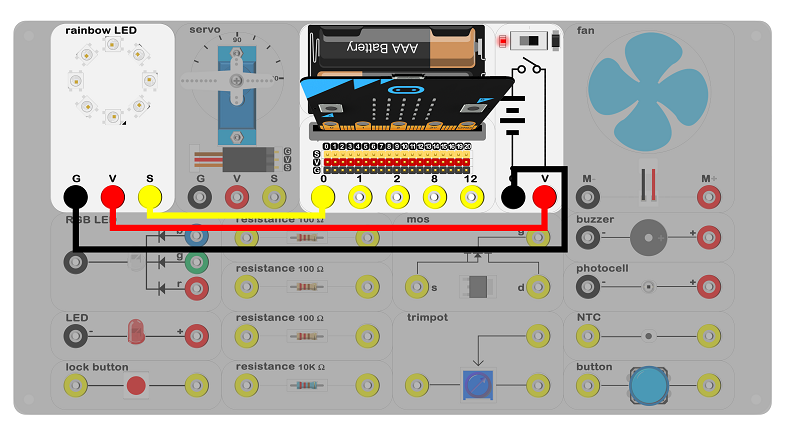
Conectar el circuito como en la imagen y colocar 2 baterías AAA en el portapilas.
Un motor transforma la energía eléctrica en energía cinética mediante inducción electromagnética. Cuando se aplica voltaje en las conexiones del motor, el motor gira en un sentido, si se invierte la polaridad, cambia de sentido. Cuanto mayor sea el voltaje, más rápido será el giro
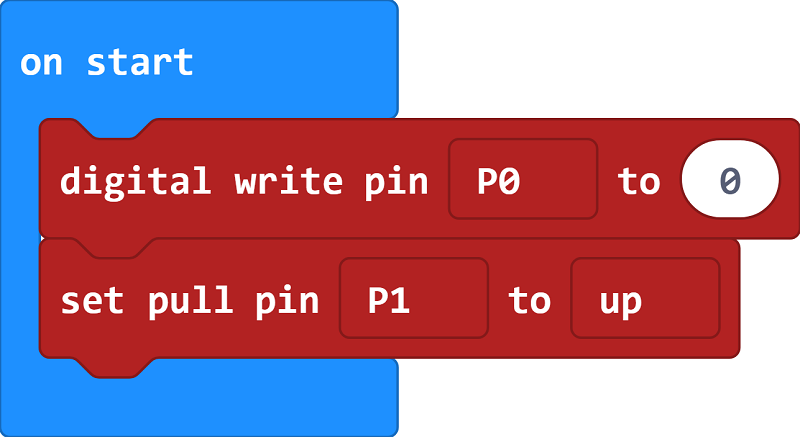
Dentro del bloque “al iniciar”, insertar los bloques “escritura digital” y “configurar pull”. Configurar P1 y P0 como se indica en la imagen
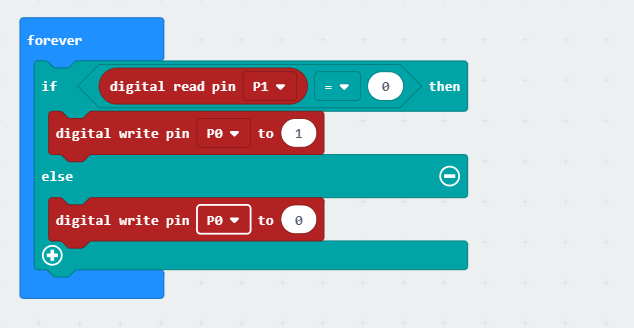
Dentro del bloque “para siempre” insertar el bloque “si – si no”. Si lo es, escribir 1 en el pin P0 para accionar el motor; si no lo es, escribir 0 en el pin P0 para detener el motor
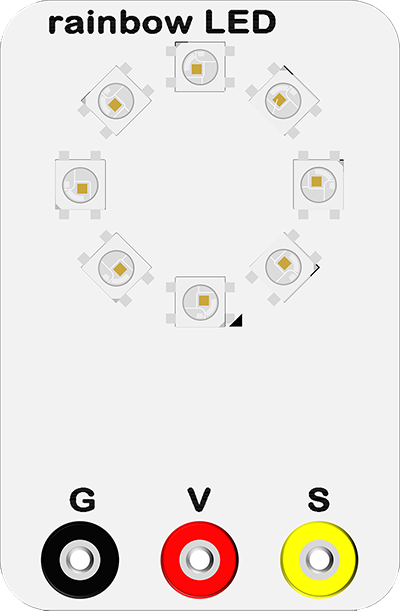
En esta práctica, el LED RGB Arcoiris se programa con micro: bit para hacer que los colores del arco iris giren alrededor del anillo.
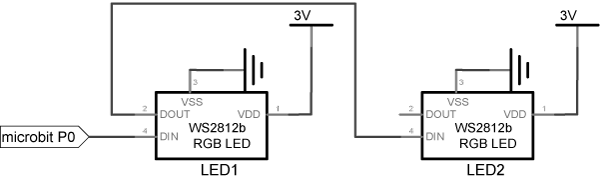
Conectar el circuito como en la imagen y colocar 2 baterías AAA en el portapilas./
El anillo LED RGB Arcoiris está compuesto de 8 píxeles ws2812b en una conexión en cascada. Cada ws2812b está hecho de un circuito de control integrado y un LED RGB. El primer píxel recibe 24 bits de datos a través del puerto DIN (Entrada de datos), mientras que el resto de los datos se envía a los siguientes píxeles a través del puerto DOUT (Salida de datos). Con esta técnica de reenvío de transformación automática, solo se ve afectada la velocidad de transmisión de datos, no la cantidad de datos transmitidos.
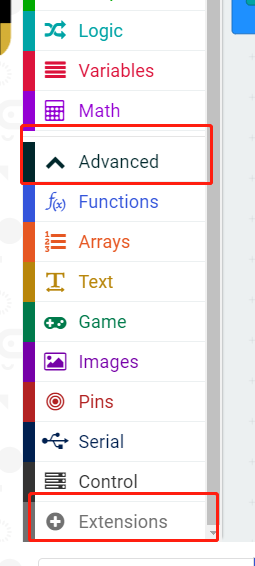
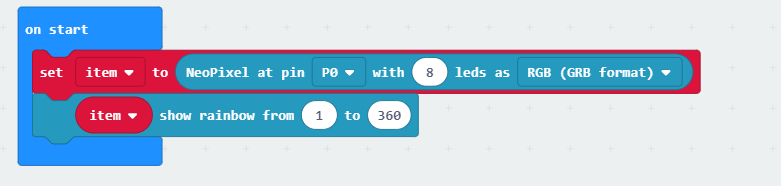
Haga clic en Avanzado para obtener más bloques de código y busque las Extensiones en la parte inferior de la columna
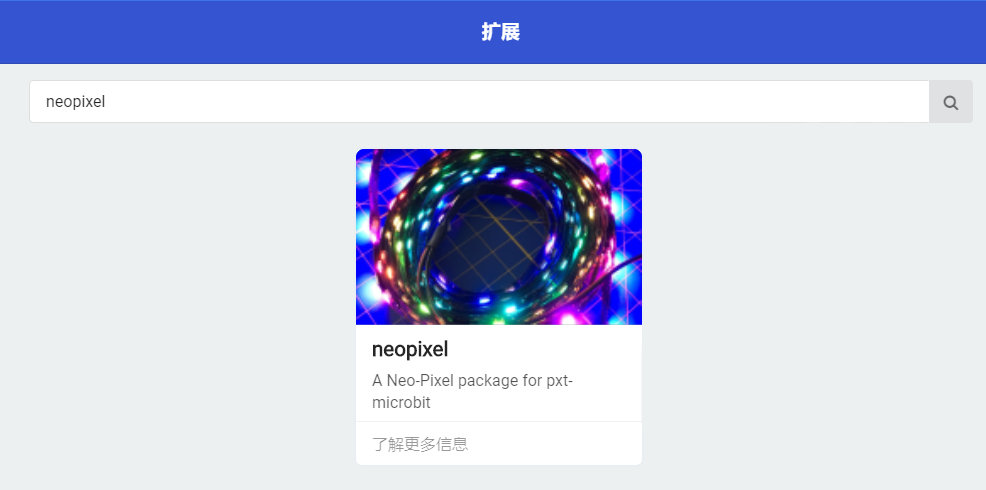
Buscar y agregar “neopixel”.
Dentro del bloque “al iniciar”, establecer el pin P0 con 8 LEDs y usar el color RGB. Configurar el arcoiris de 1 a 360
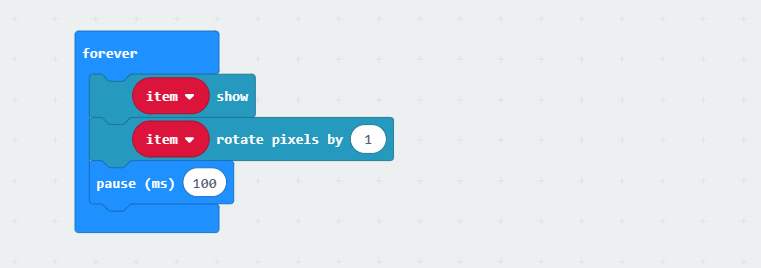
Ahora se ha configurado el color del LED, pero necesitamos un bloque de mostrar para que funcione. A continuación, configure rotar píxeles para rotar el color del LED en un anillo