








Conecta la placa MICRO:BIT al ordenador utilizando un cable micro USB. El LED de alimentación de la placa quedará encendido.
Accede al sistema de programación a través del enlace https://makecode.microbit.org/
Pulsando sobre «Nuevo Proyecto» podrás empezar a programar tu placa MICRO:BIT. El sistema de programación está basado en bloques de código, similar a Scratch o Mblock
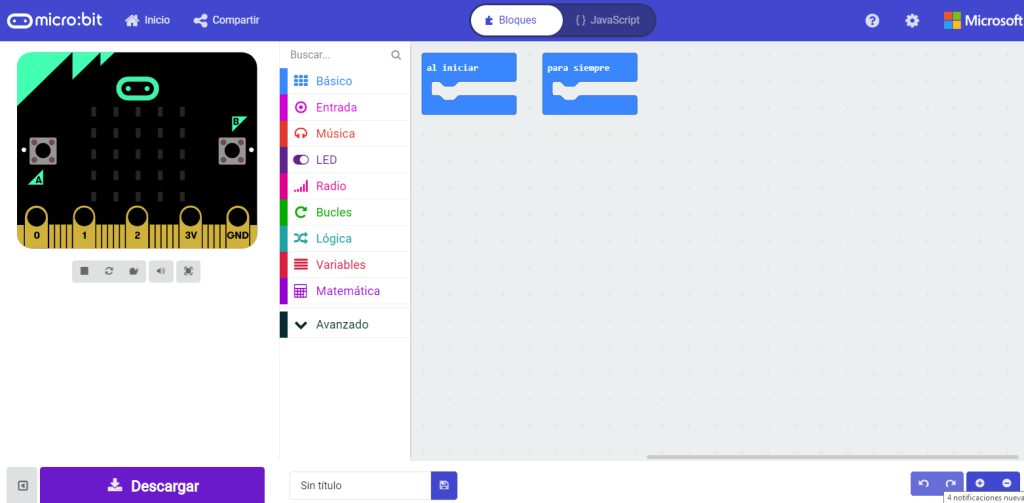
Por defecto la web de microbit muestra los bloques de programación en inglés. Podemos cambiar de idioma pulsando en el icono del engrane, arriba a la derecha.

Del menú desplegable, selecciona la opción Languaje
Se desplegará un nuevo menú con todos los idiomas disponibles. Para la realización de esta web hemos seleccionado el idoma Español (España).
A continuación, vamos a elaborar un primer programa de ejemplo para comprender la dinámica de programación con MICRO:BIT .
OBJETIVO: La tarjeta MICROBIT mostrará un mensaje en su matriz de LEDS
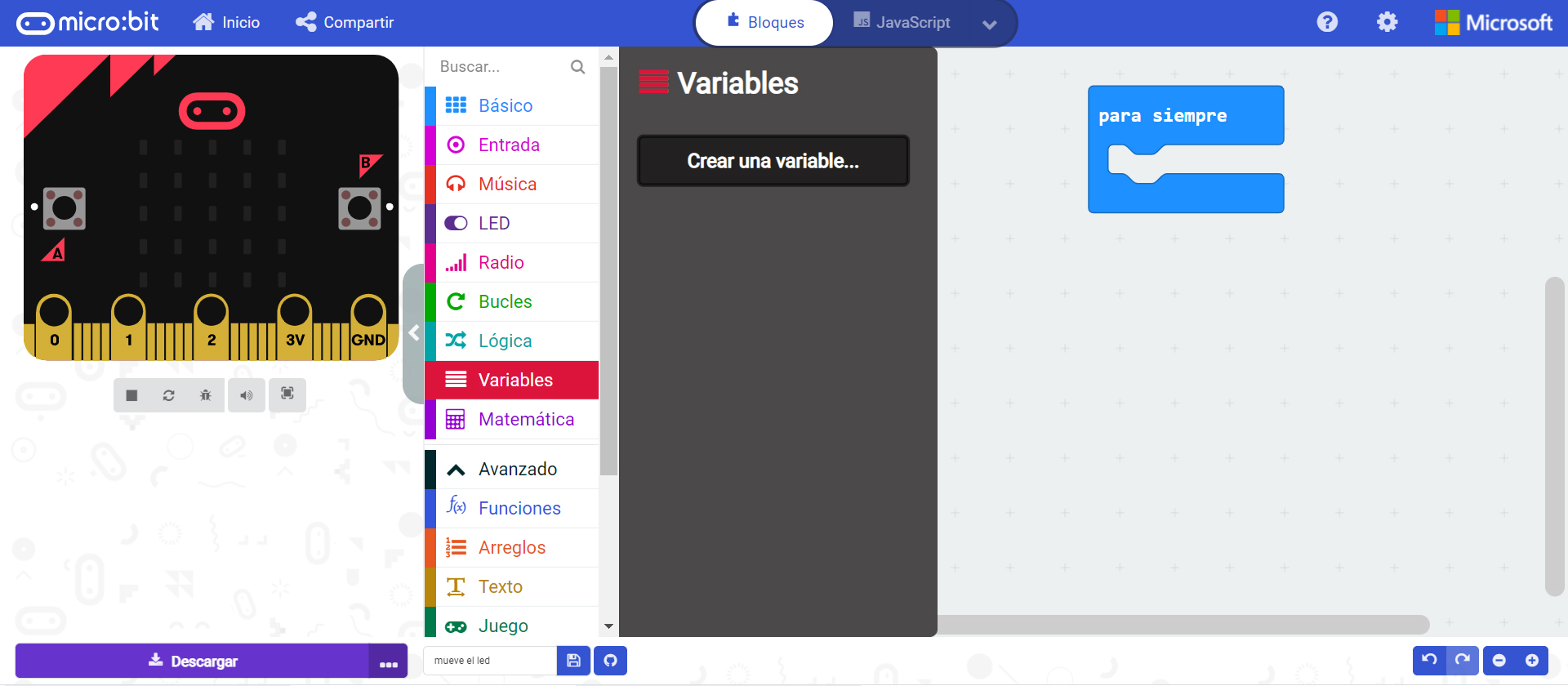
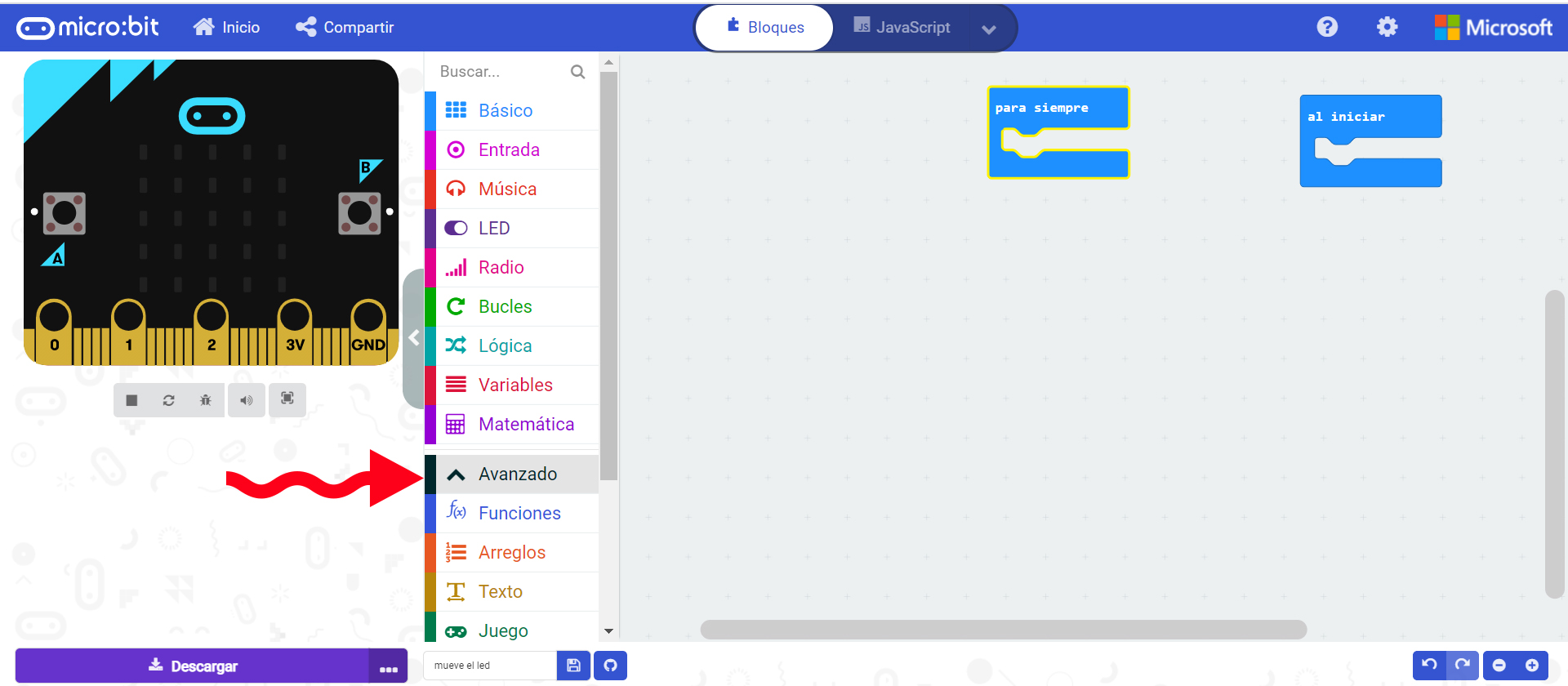
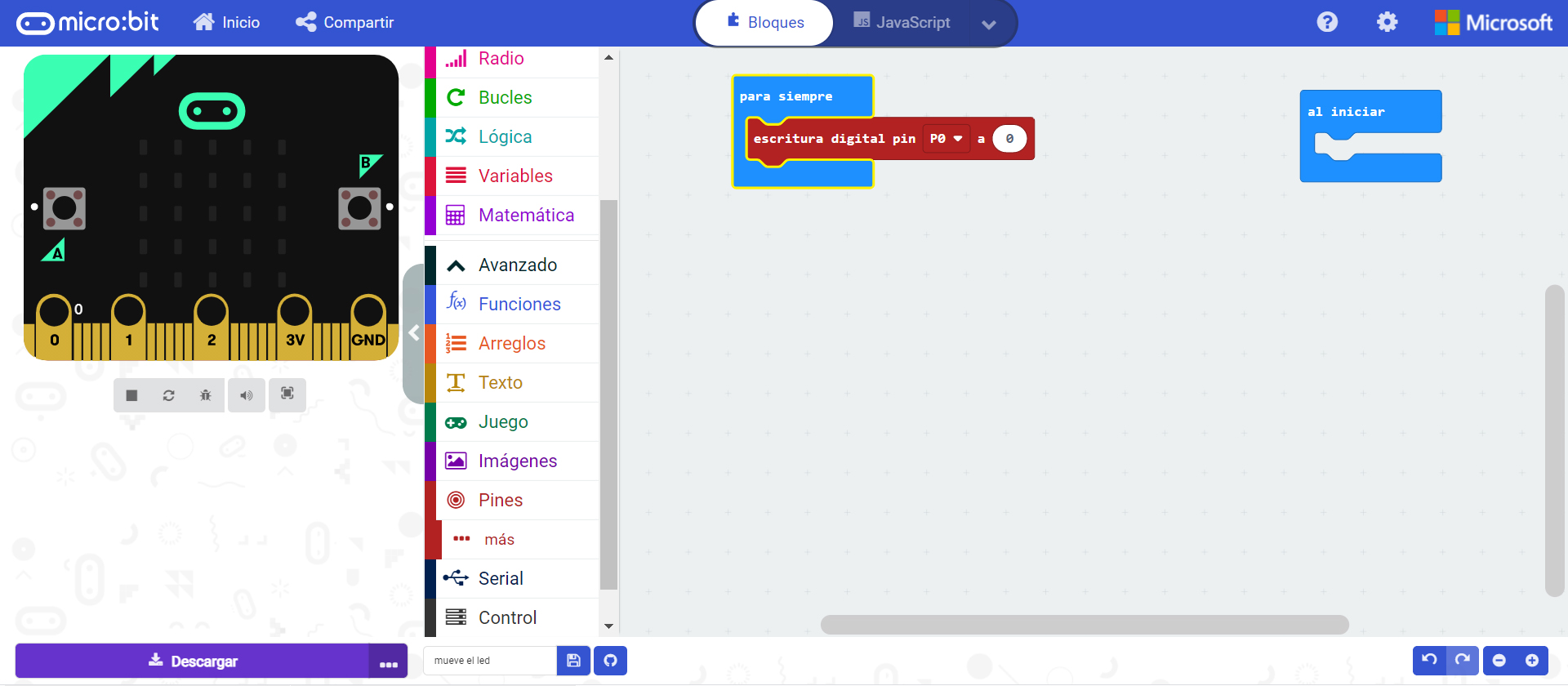
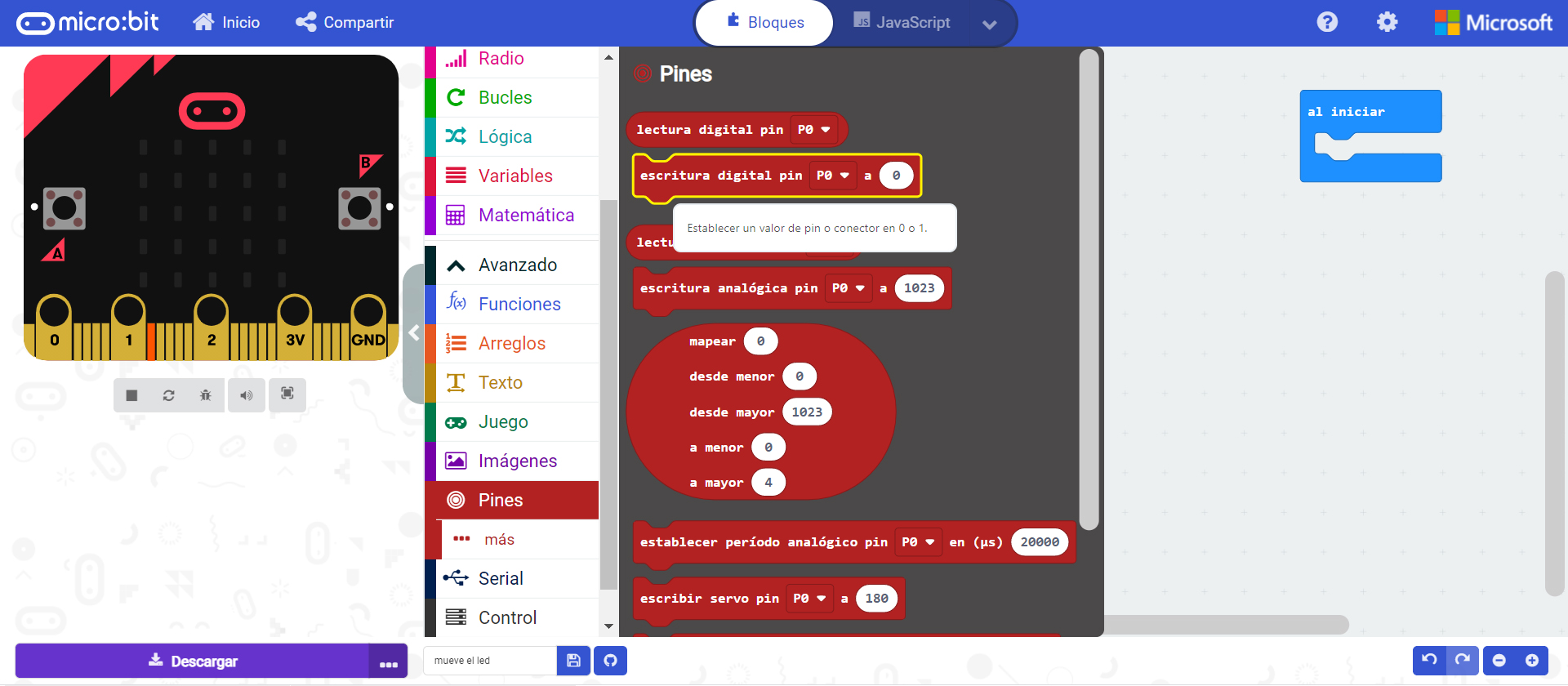
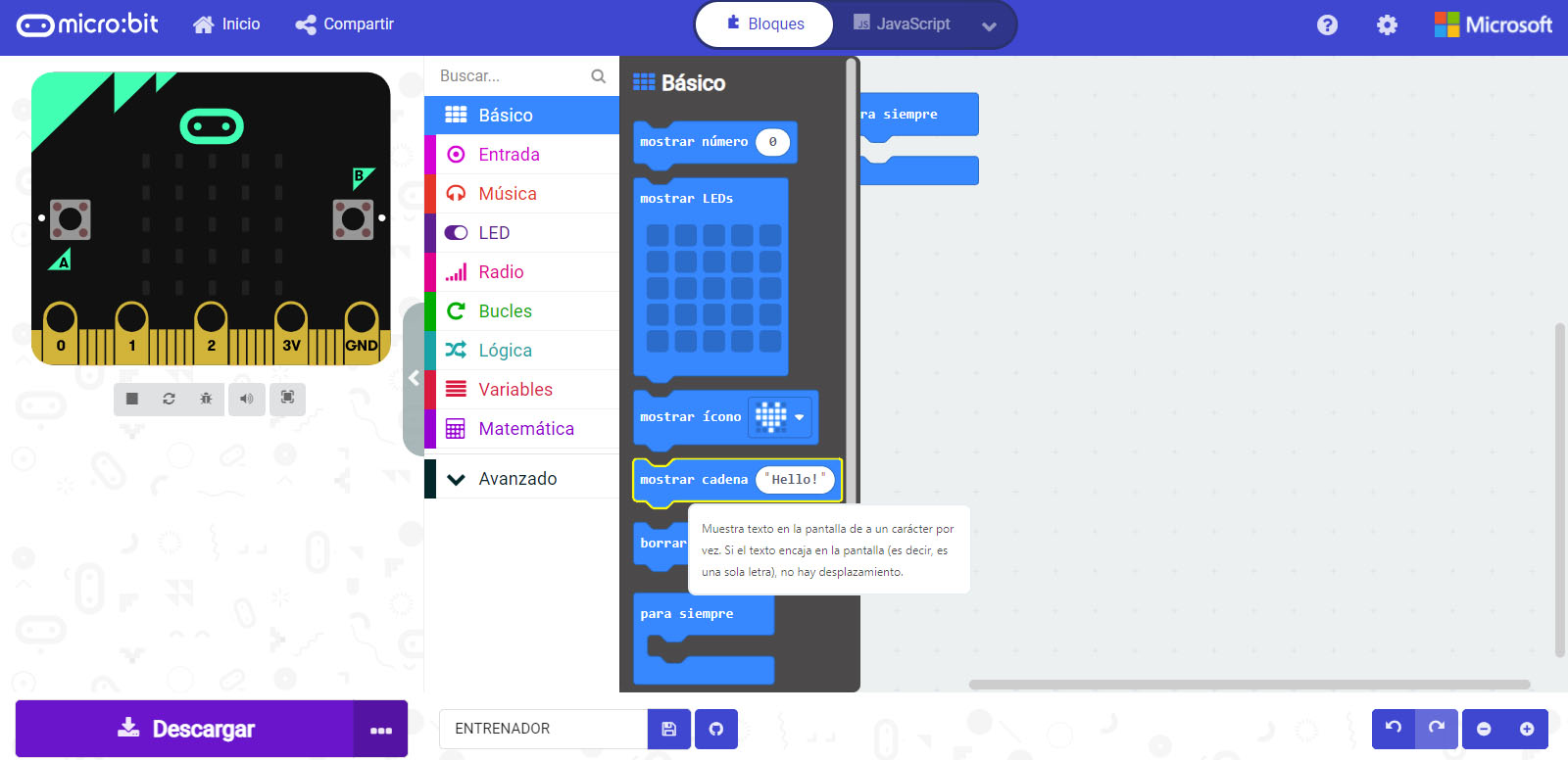
Para programar la tarjeta, el sistema de programación dispone de una serie de bloques organizados por categorías. Al iniciar un nuevo proyecto vemos que en el escritorio de trabajo se muestran dos bloques: «al iniciar» y «por siempre«
La placa realizará las órdenes de los bloques introducidos en éste bloque 1 sola vez al conectarla
La placa realizará la secuencia de órdenes introducidas en este bloque infinitas veces y de forma continuada
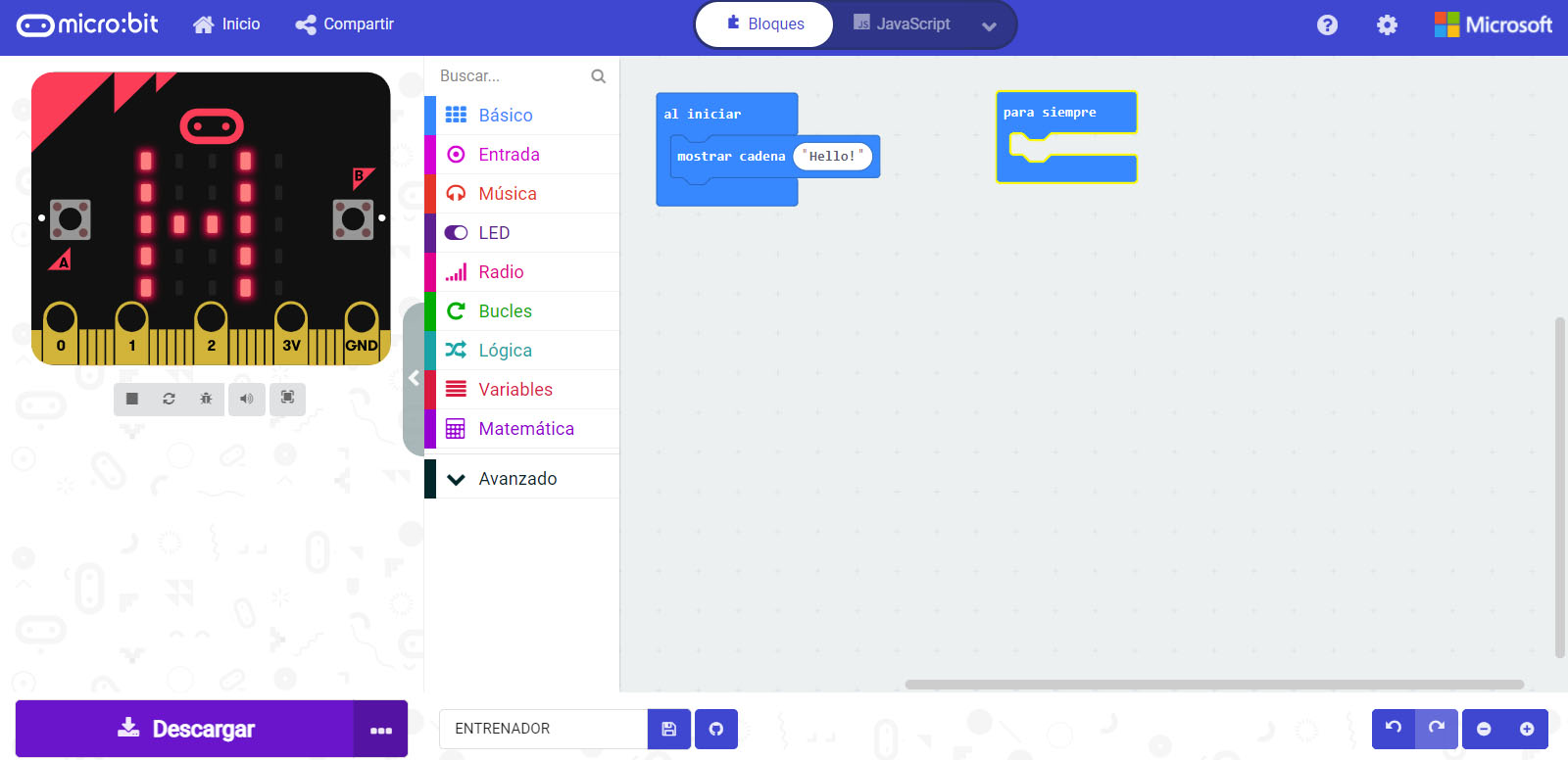

Al incorporar este bloque dentro de «al iniciar«, comprobamos en el emulador de la izquierda de la pantalla, que la placa muestra el texto una sola vez
La forma más cómoda de trabajar es emparejando la placa con el PC. De esta forma los programas se descargarán en la placa con solo pulsar un botón.
En la pantalla de makecode verás que abajo a la izquierda hay un botón morado llamado «descargar». Al lado tienes un icono con 3 puntos (…). Pulsa sobre los 3 puntos:
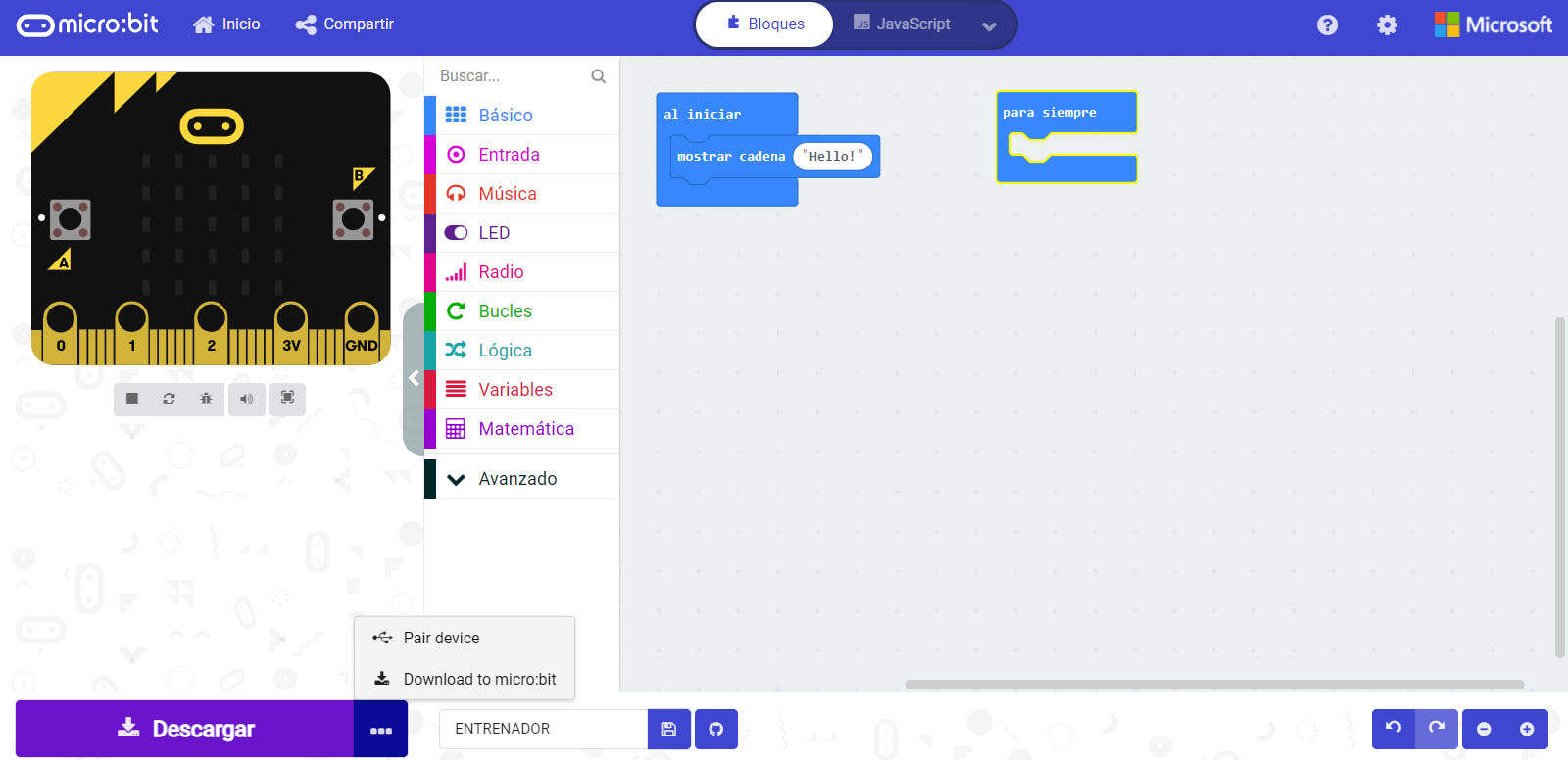
Aparece un pequeño menú, pulsa sobre «emparejar» o «pair device» y verás la siguiente pantalla. 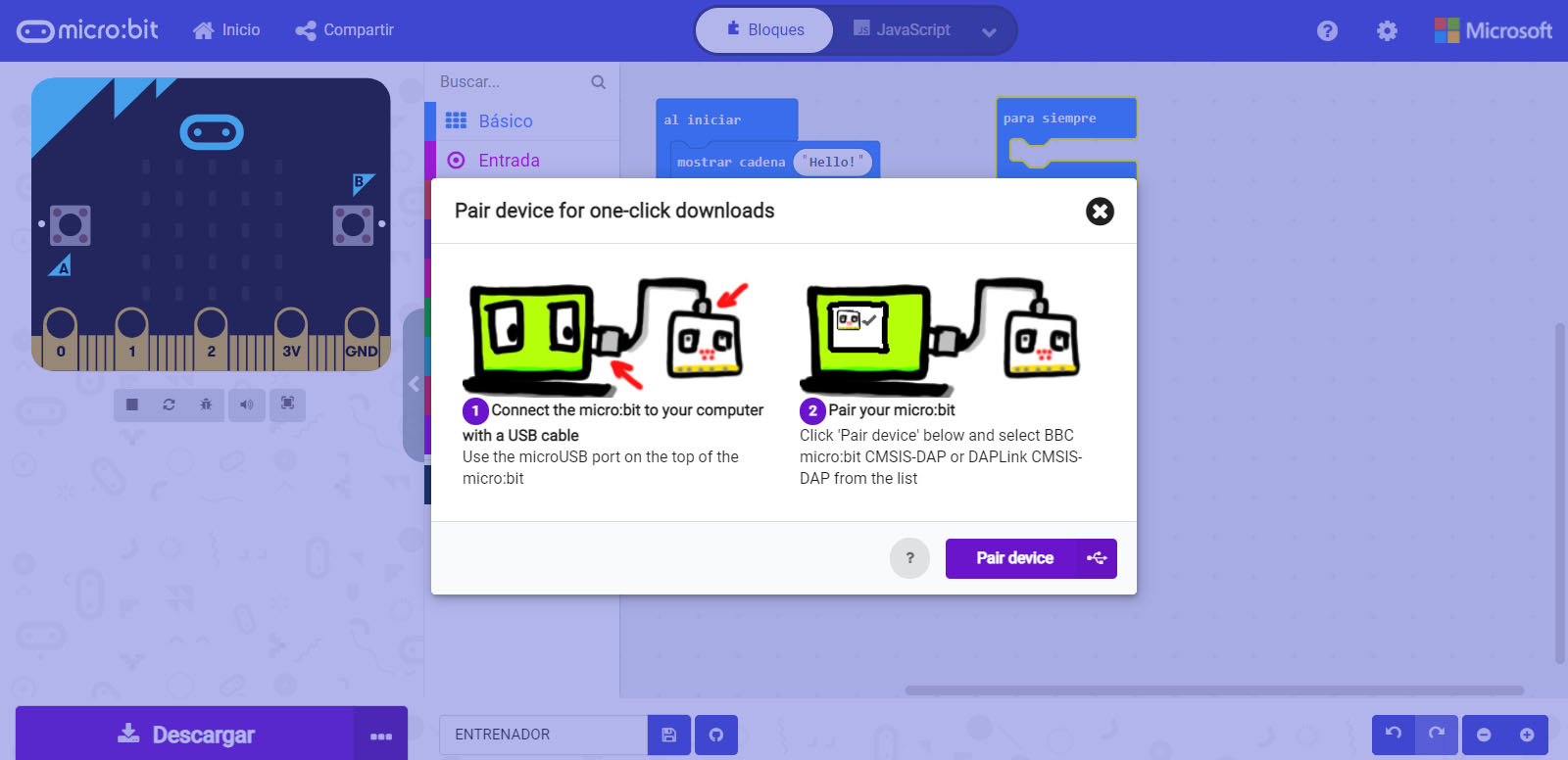
Si no tenías conectada la placa al PC a través del cable USB, conéctala y pulsa en «emparejar» o «pair device». Se mostrará la siguiente pantalla:
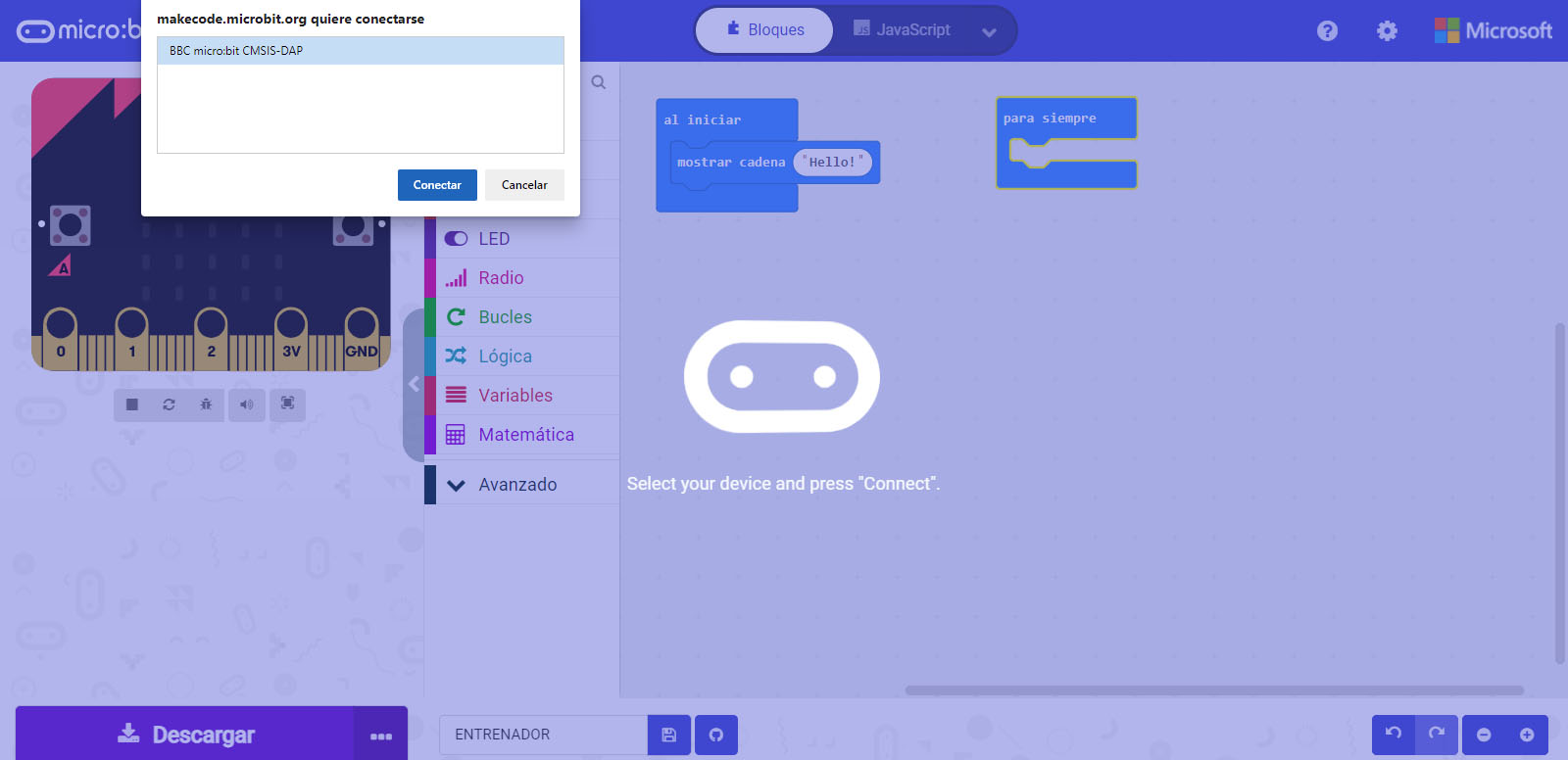
Haz clic con el ratón sobre la placa microbit, y pulsa en conectar. A partir de ahora la placa quedará emparejada al ordenador durante toda la sesión de trabajo.
Para guardar el programa en la placa, pulsa el botón morado descargar, abajo a la izquierda. El programa se descargará directamente a la placa microbit.
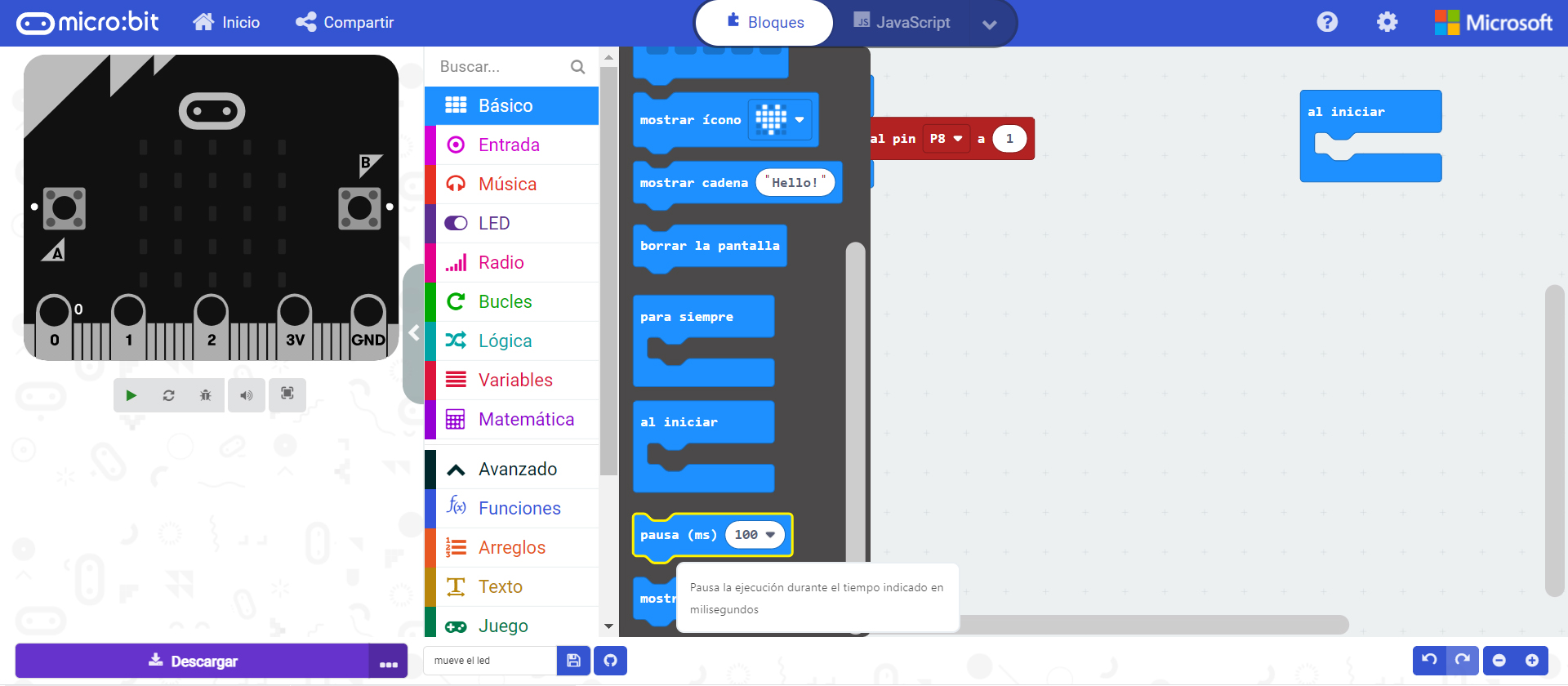
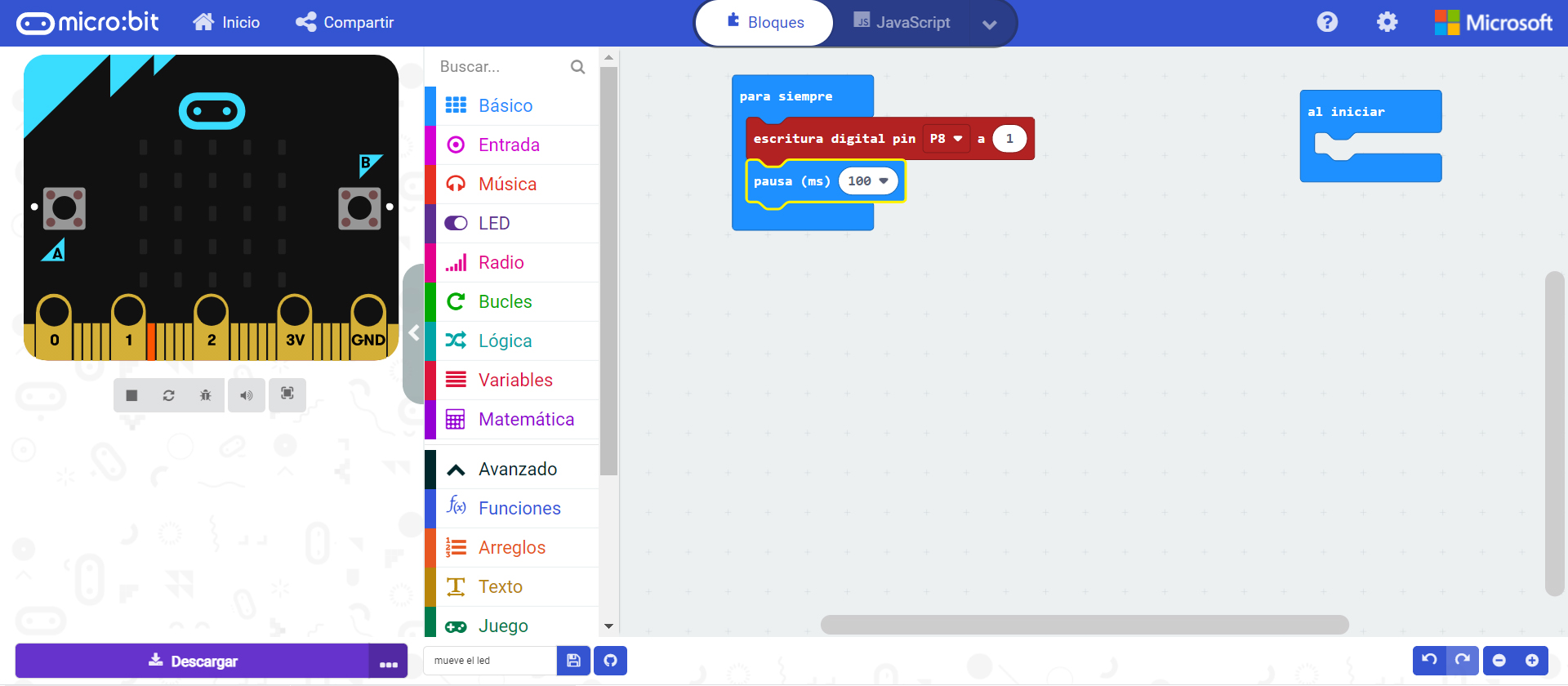
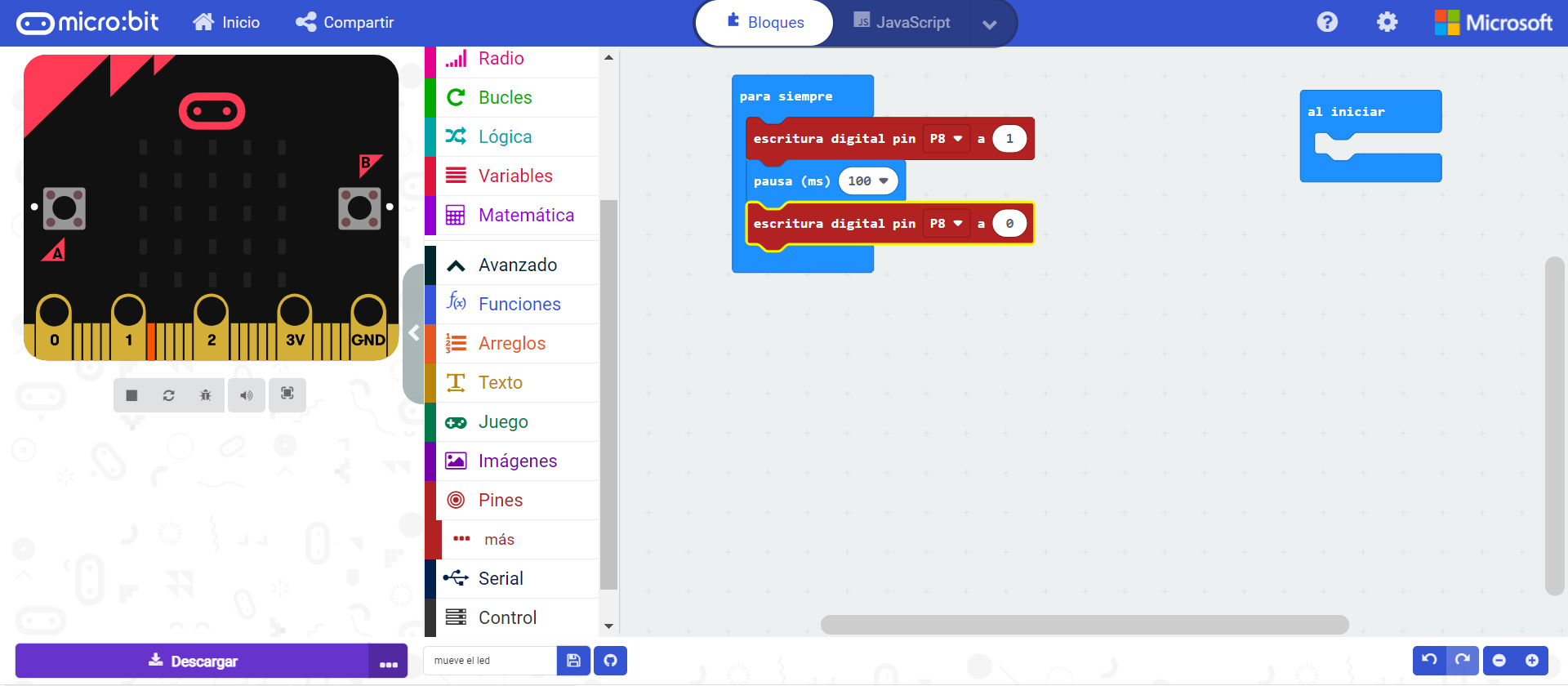
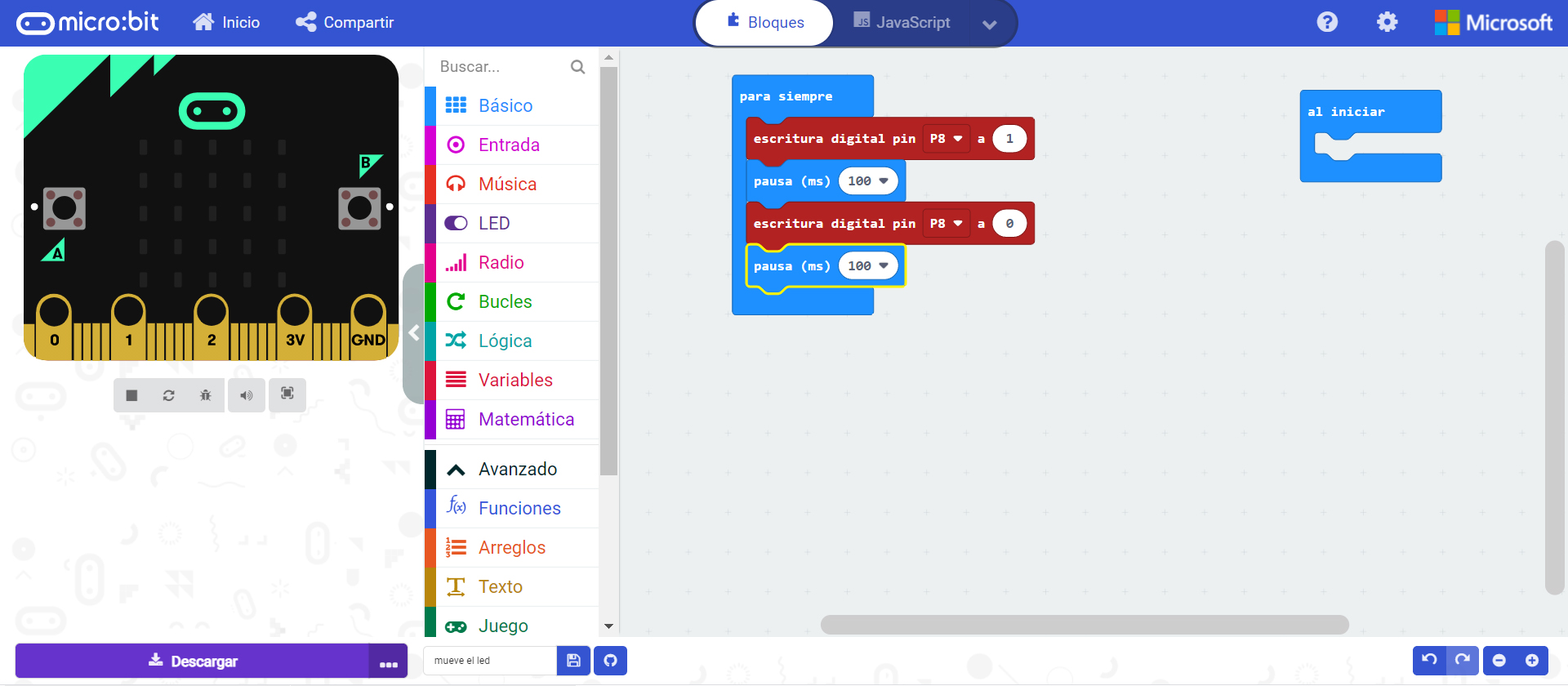
Una vez descargado, el mensaje se mostrará una sola vez. Si queremos que se repita indefinidamente, cambiaremos el programa utilizando el bloque «para siempre» en lugar de «al iniciar». ¡Puedes hacer la prueba tú mismo!.
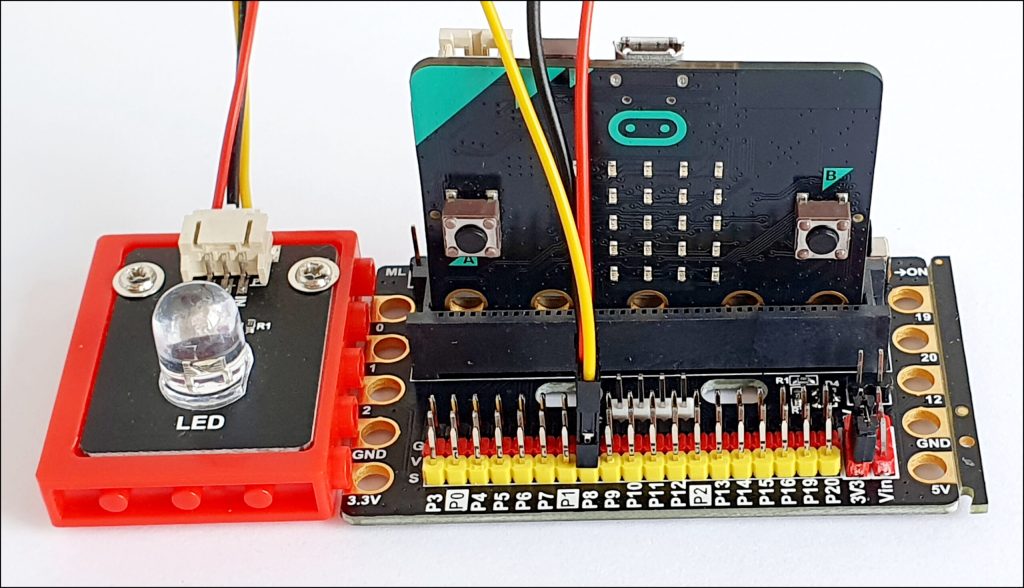
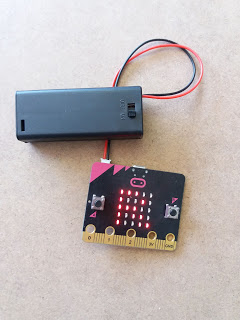
Si quieres que la placa funcione de forma autónoma sin estar conectada al PC, basta con quitar el cable USB y conectar un portapilas específico con conectar para microbit.
El Entrenador para Micro:bit LOG 8112 está compuesto por varios sensores y operadores que puedes controlar con una placa Micro:bit.
Los módulos electrónicos presentan un formato que puede adaptarse a piezas tipo LEGO, por lo tanto, se pueden incorporar a otros productos LEGO.
El entrenador contiene las siguientes piezas:

No incluye placa controladora Micro:bit. Si necesitas adquirir una placa puedes encontrar en www.microlog.es
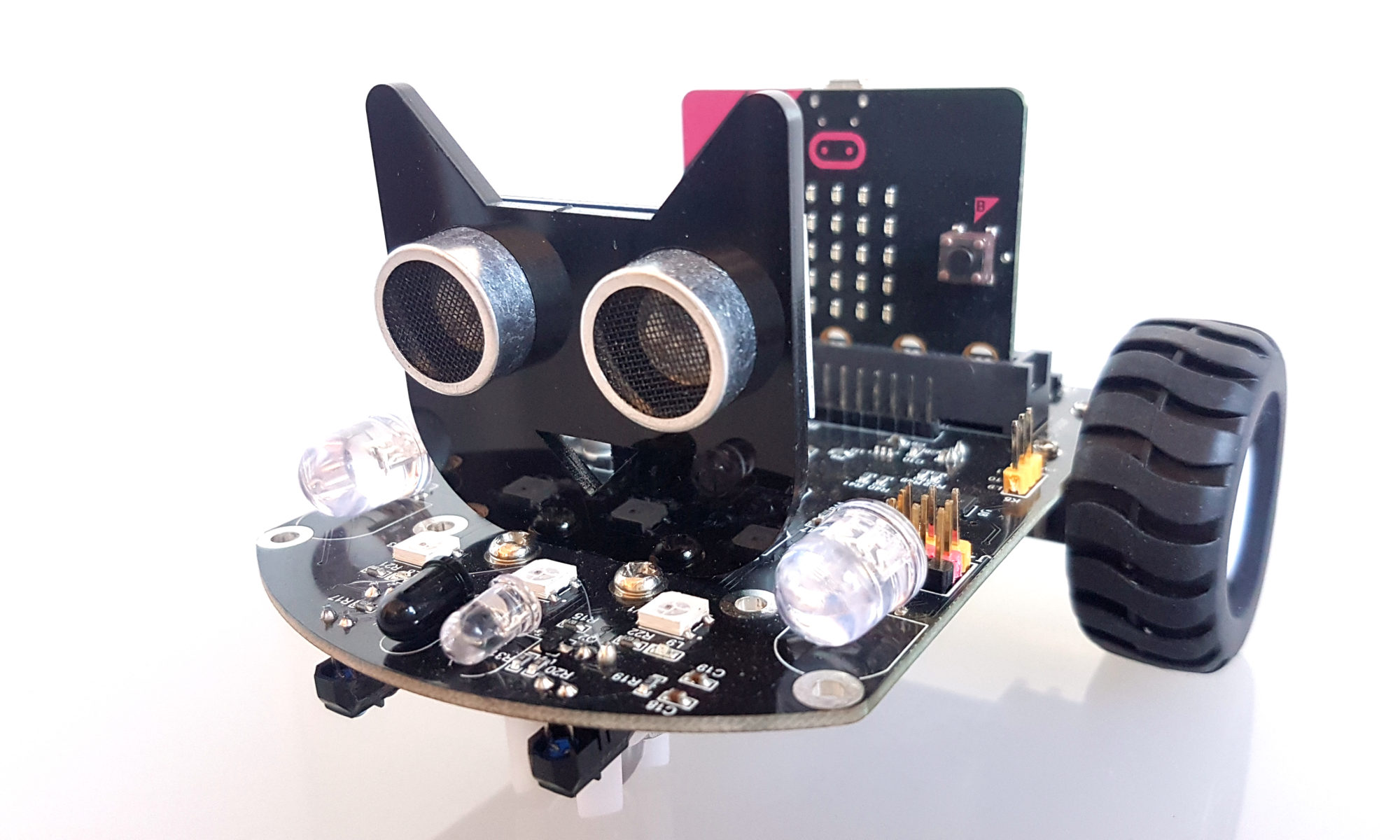
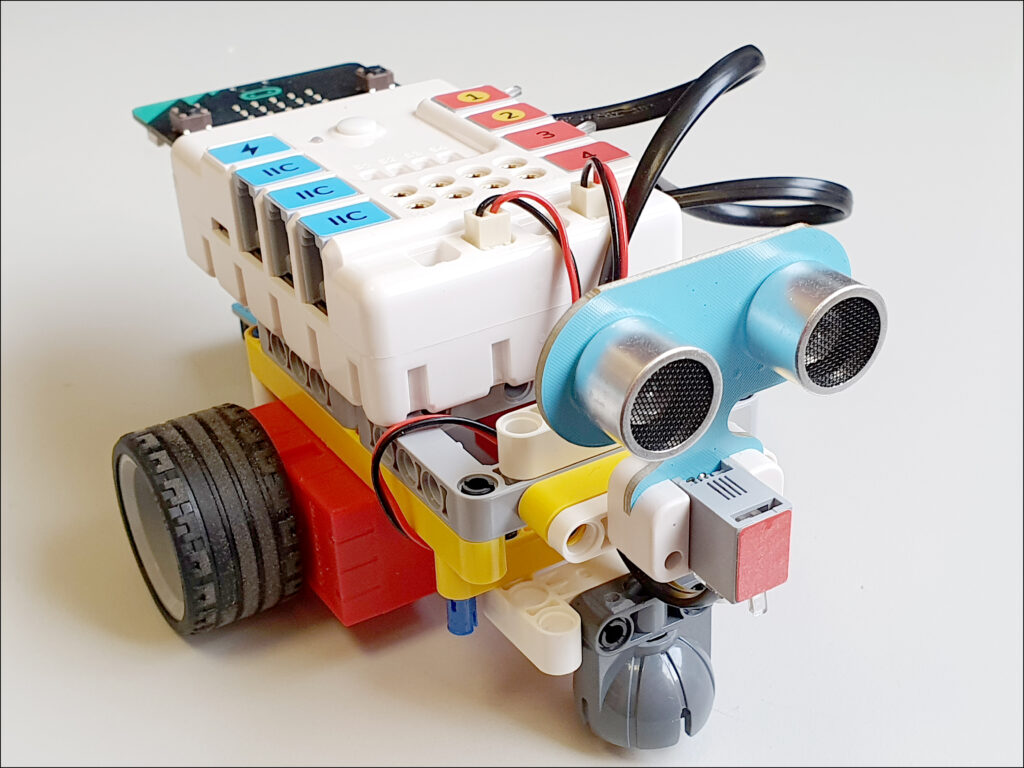
Nezha es un pack de proyectos para Lego y Micro:bit.

El pack contiene motores, sensores, actuadores y piezas compatibles Lego para que puedas realizar tus proyectos de robótica. Además es compatible con Fishertechnik.
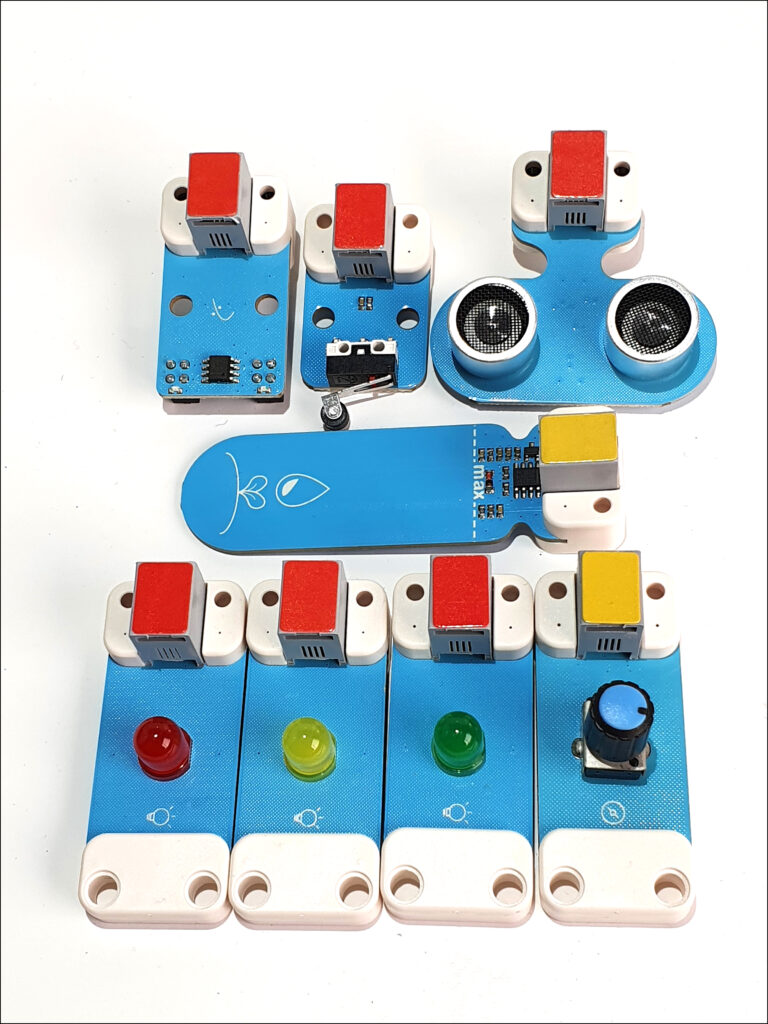
El maletín Nezha incluye los siguientes elementos
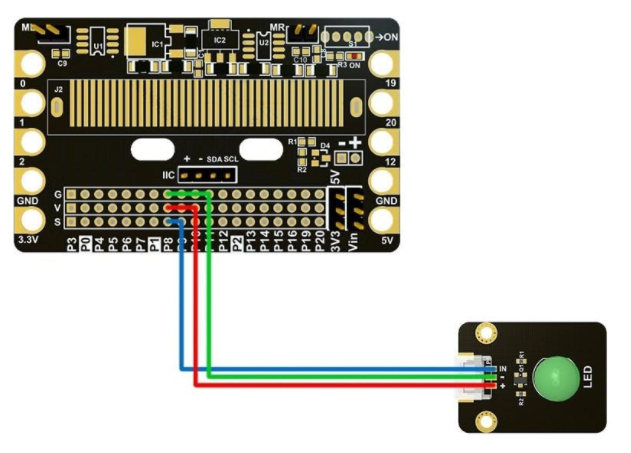
– Led verde
– Led rojo
– Led amarillo
– Sensor de humedad
– Sensor de línea
– Sensor ultrasonido
– Sensor de contacto
– Potenciómetro
– 2 motores
– 1 servomotor
– Bloque de conexiones con batería
– Cables de conexión RJ
– Cable USB
– Piezas compatibles LEGO
El bloque de conexiones de Nezha elimina las barreras que puedas encontrar en tus diseños a la hora de elaborar circuitos, ya que el cableado principal se realiza con conectores RJ
Y la programación es muy sencilla, puedes realizarla desde el sistema de bloques de Micro:bit añadiendo las extensiones Nezha y PlanetX.
Accede a https://makecode.microbit.org/ y pulsa en «+ nuevo proyecto«.
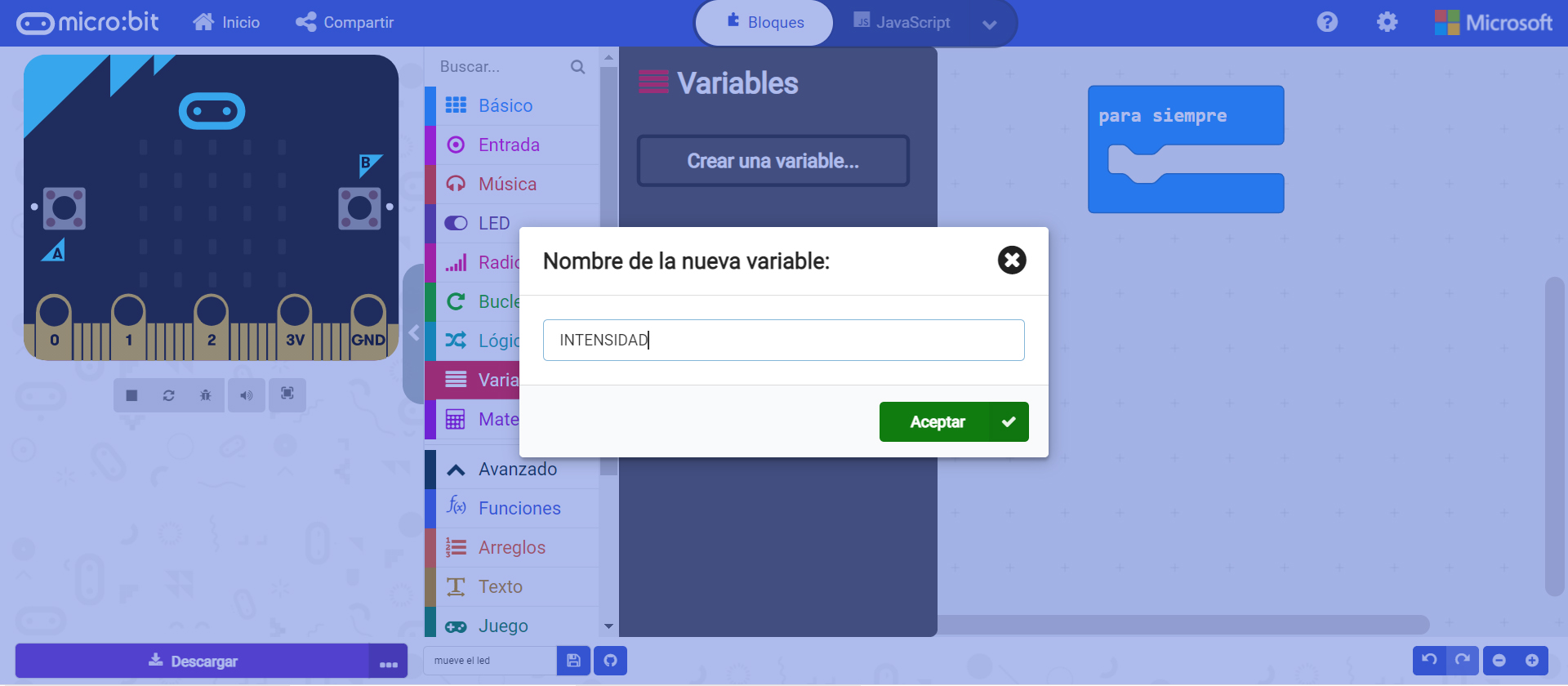
Escribe un nombre para tu proyecto y pulsa «Crear«.
Una vez dentro de tu proyecto, pulsa en el icono del engrane, arriba a la derecha …
En el menú que se ha desplegado, selecciona la opción «extensiones«
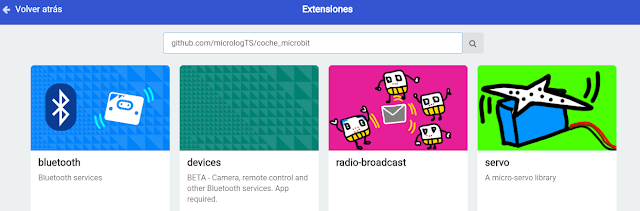
En el cuadro de búsqueda introduce PlanetX y pulsa la lupa. Encontrarás la siguiente extensión:
Pulsa sobre la extensión y automáticamente se añadirán nuevos bloques a tu proyecto que podrás utilizar para controlar los sensores de Nezha
Realiza los mismos pasos para añadir la extensión Nezha y tendrás tu espacio listo para empezar a programar tu kit.

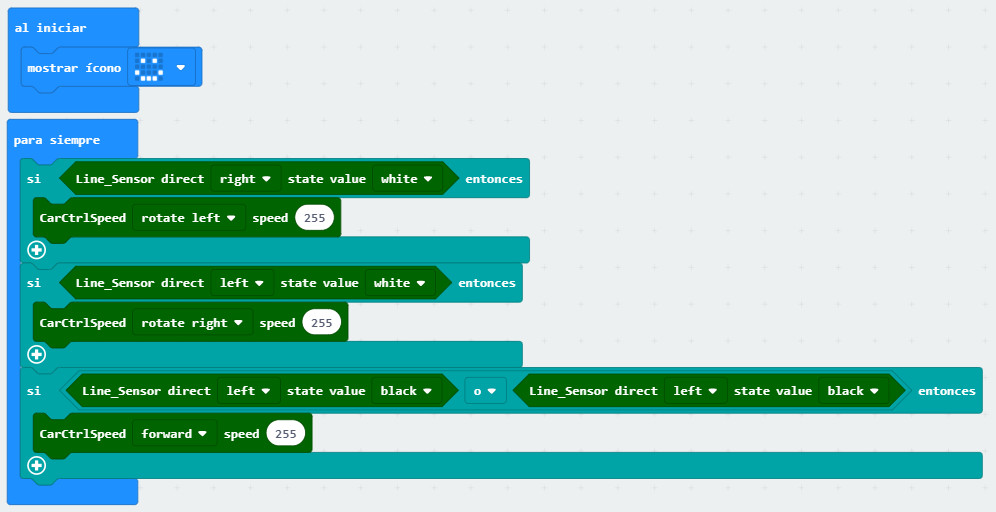
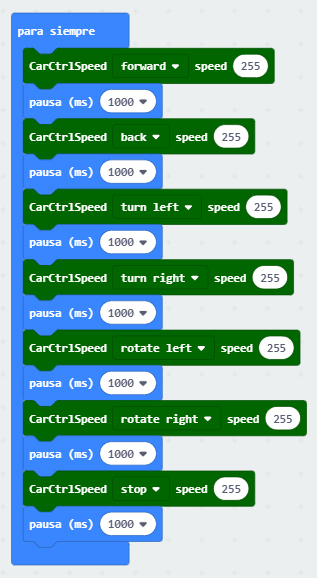
Pulsando en esta sección accedemos a los bloques para programar los movimientos del coche.



Microbit incluye en a propia placa dos pulsadores serigrafiados como A y B. Utilizamos este bloque para indicar a la placa que cuando alguien presione un pulsador concreto qué acciones debe realizar.


En esta sección encontraremos módulos específicos para la lectura de los sensores del coche
Pulsando en esta sección accedemos a los bloques para programar el coche.

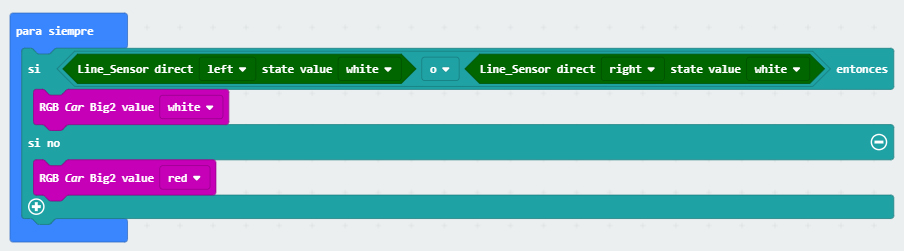
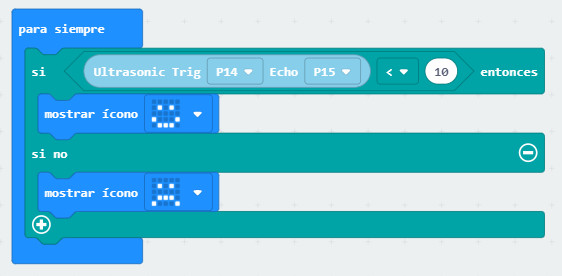
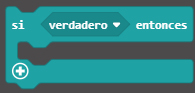
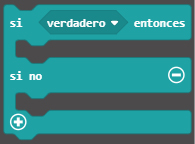
Los robots tienen la capacidad de tomar decisiones en función del entorno que les rodea. Para poder crear esa capacidad de decisión disponemos de bloques en la sección de lógica que nos ayudarán a programar la inteligencia del robot

La evaluación de la unión de las condiciones es verdadera si ambas condiciones lo son

Para que la evaluación de la unión de las dos condiciones se verdadera, basta con que una de las dos condiciones que se unen se cumpla