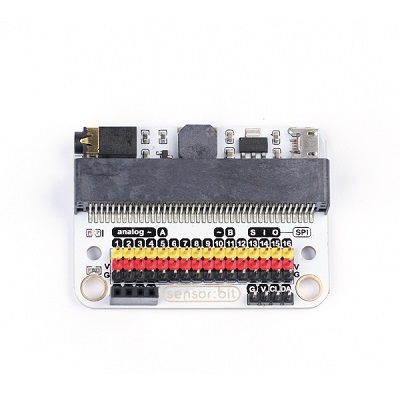
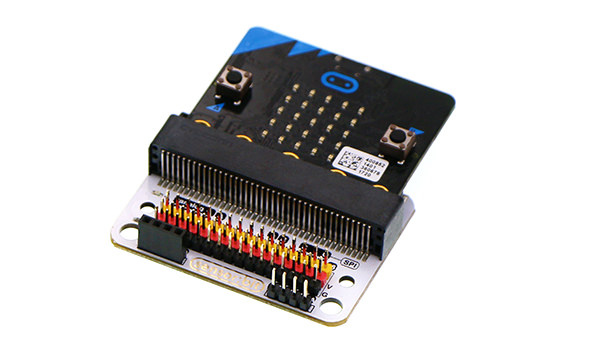
Sensor:Bit es una placa de expansión para microbit que facilita las conexiones para los diferentes sensores que se incluyen en el pack Smart Home.
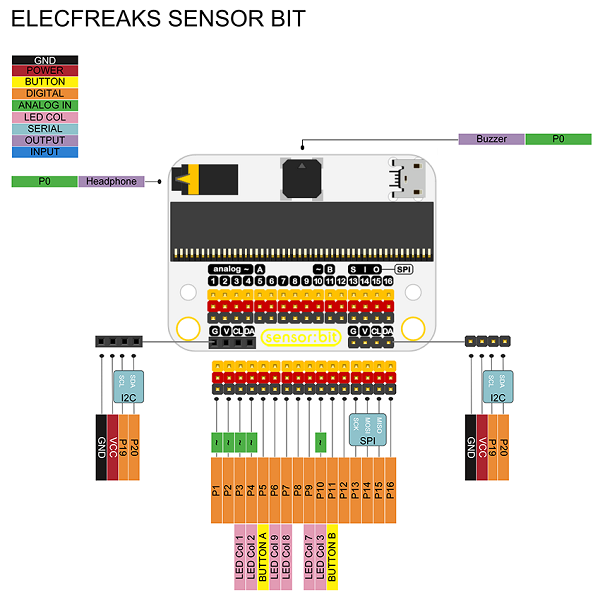
Esta placa de expansión proporciona los pines necesarios para realizar las conexiones en la zona de contactos de micro:bit, proporcionando a cada sensor su propio pin 3V y GND.
Incluye un jack de audio para la reproducción de música y un zumbador.
Por último incorpora dos conexiones para dispositivos I2C.
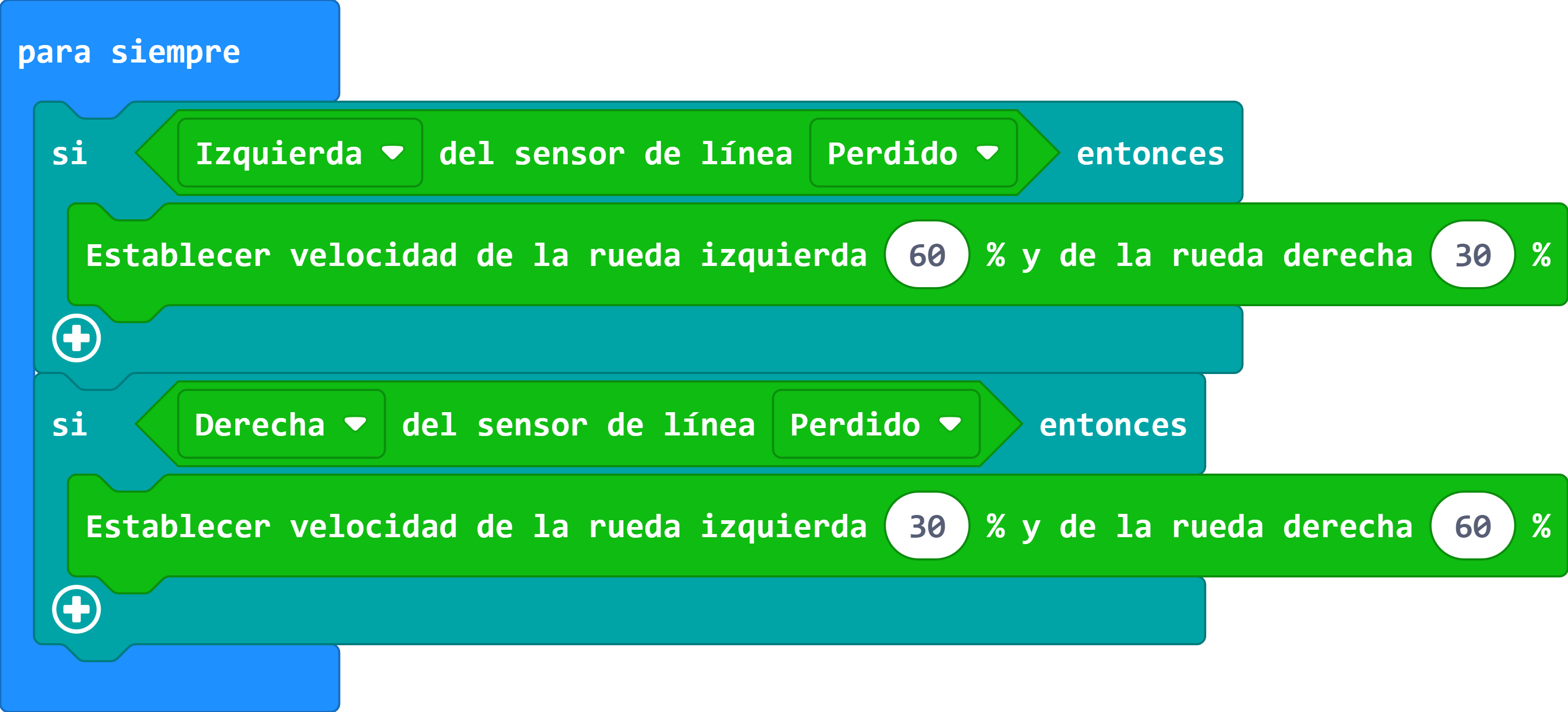
El coche avanza siguiendo el recorrido de una línea negra gruesa
Programación
El coche avanza realizando un movimiento diagonal dentro de la línea. Así avanza girado ligeramente a la izquierda mientras el sensor de la derecha detecte el color blanco, y girará ligeramente a la derecha mientras el sensor de la izquierda detecte el color blanco
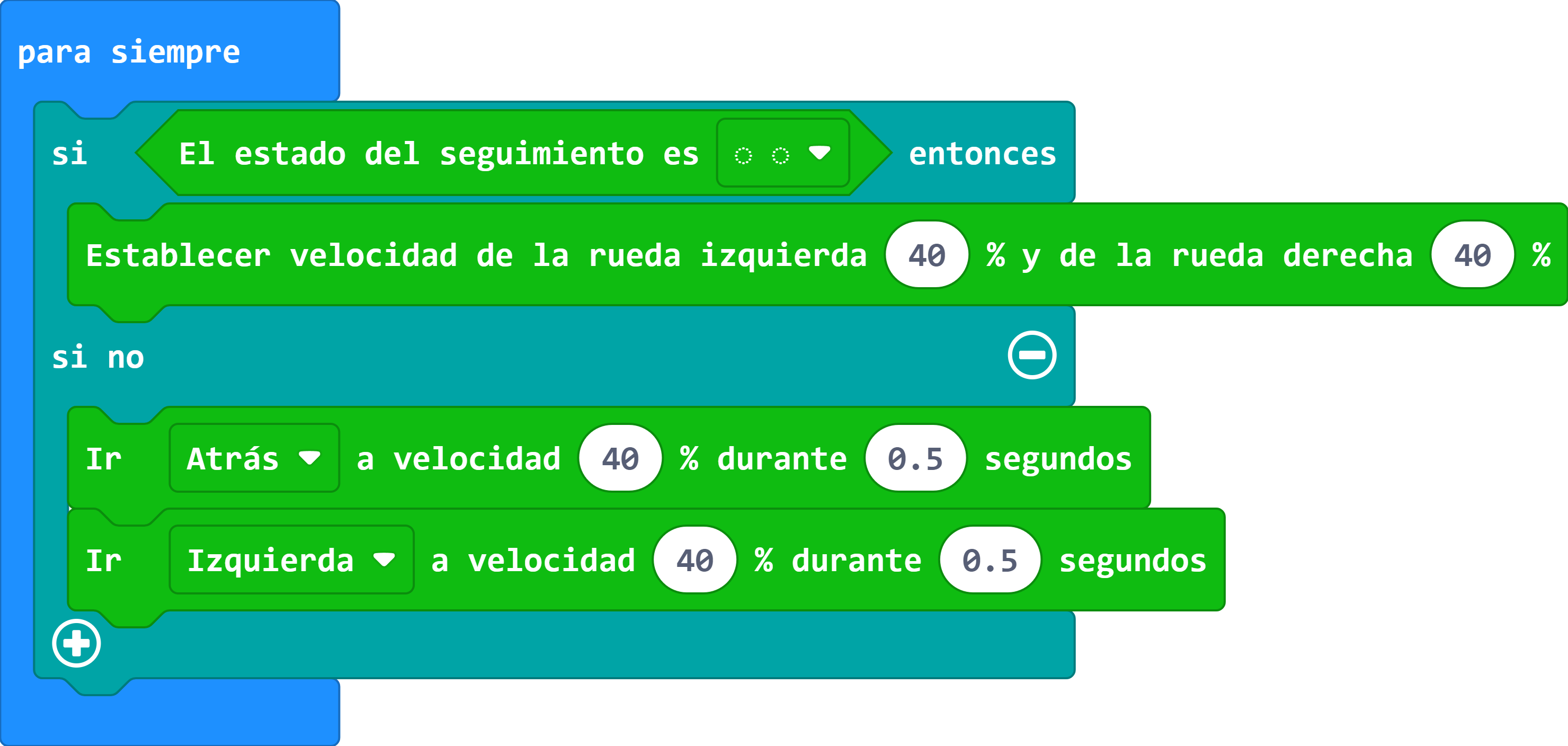
El coche se desplaza dentro de un recinto cerrado por una línea negra y no se sale de él
Programación
El coche dispone de dos sensores de línea (derecha e izquierda). Si ambos sensores están en la zona blanca, el coche avanza recta. Si algún sensor está en la zona negra, el coche gira
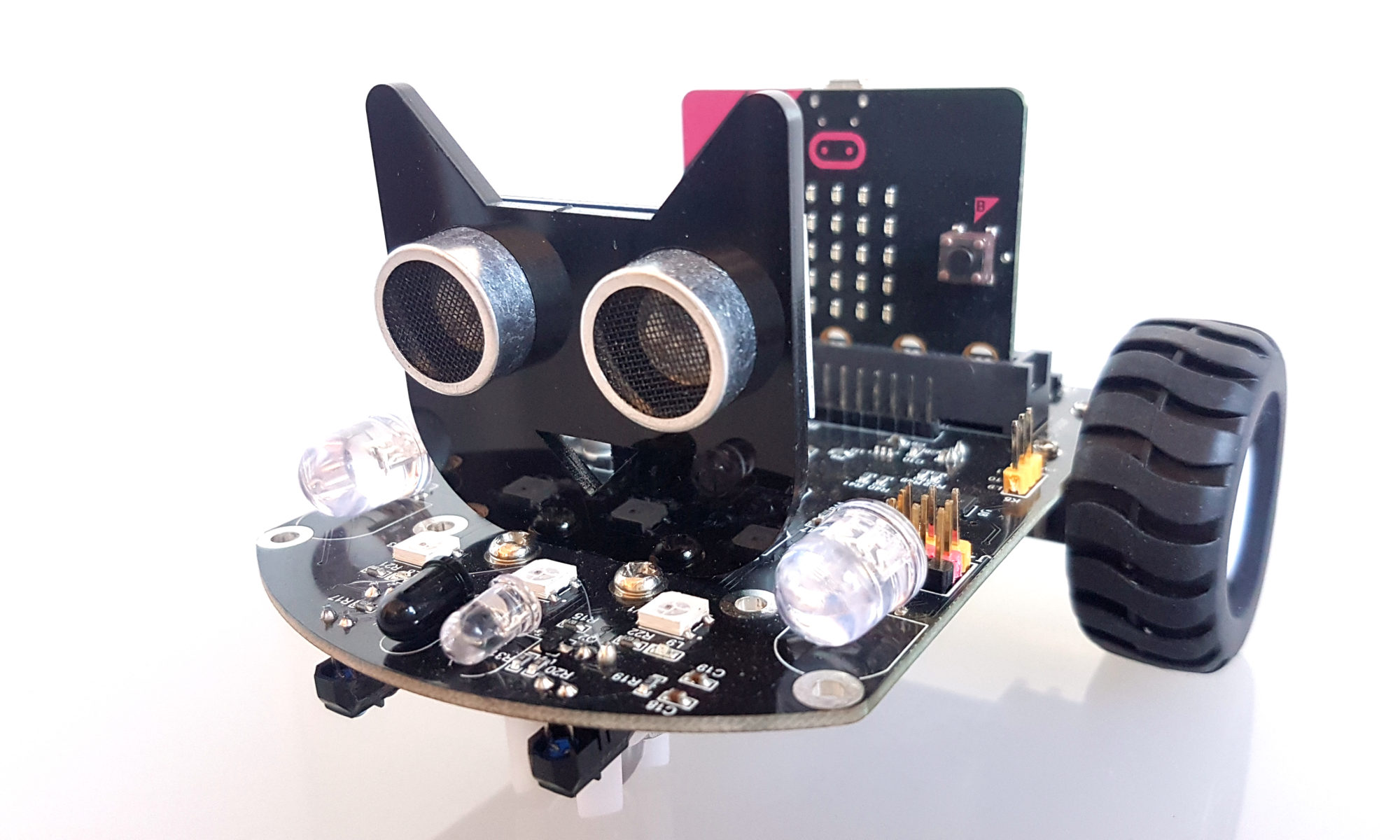
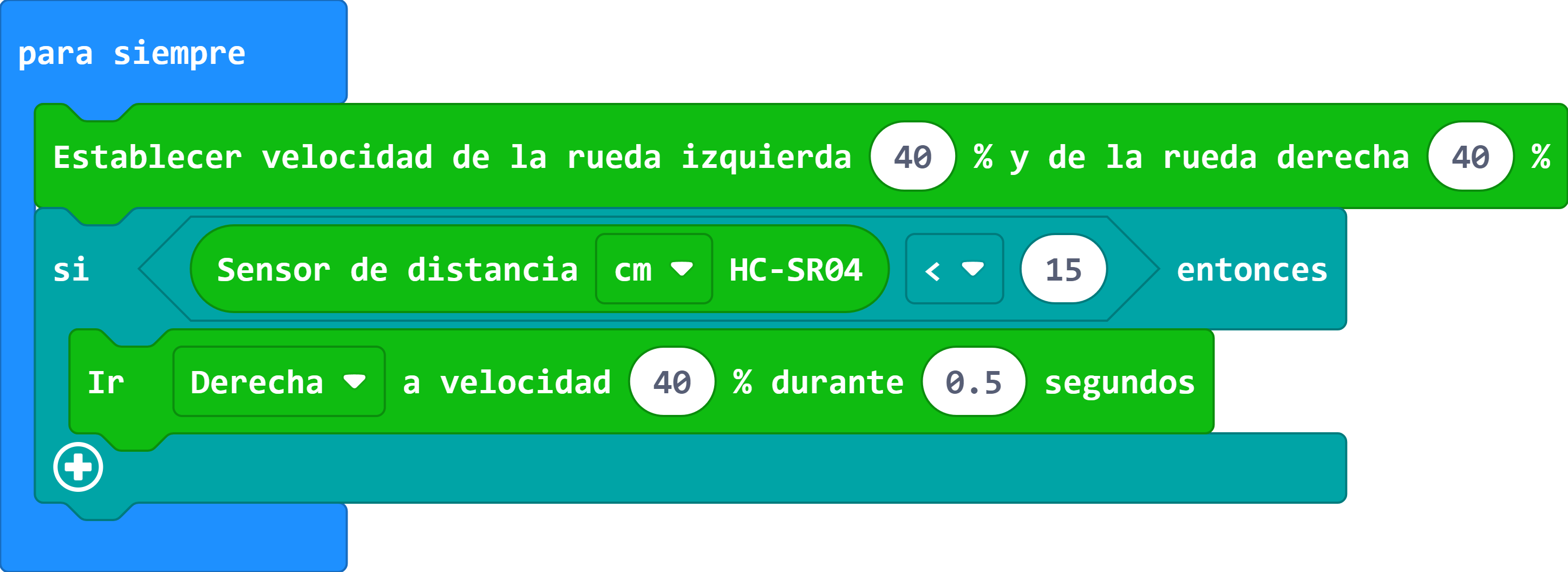
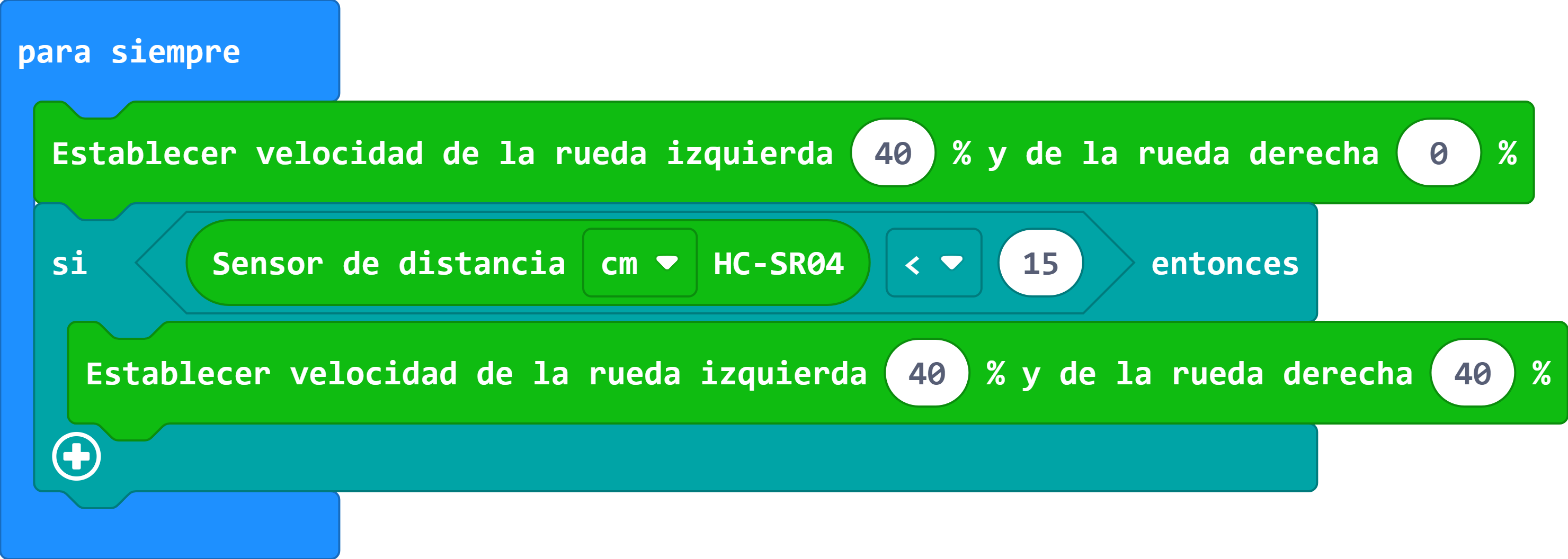
El coche busca un objeto cercano y se acerca a él para empujarlo, utilizando la medición del sensor ultrasonido.
Programación:
Establecemos una velocidad de giro del 40% en la rueda izquierda y 0 en la derecha para provocar un giro lento en el coche. Si mientras que está girando, el sensor ultrasonido detecta un obstáculo a una distancia menor de 15 cm, ambas ruedas giran al 40% para que el vehículo avance en línea recta hacia el objeto.
El coche muestra colores personalizados en sus leds
Programación
Para crear nuestra gama de color, disponemos del bloque «establecer color en los faros del led». Este bloque nos permite mezclar las luces rojo, verde y azul indicando la intensidad de cada una de estas luces con valores de 0 a 255.
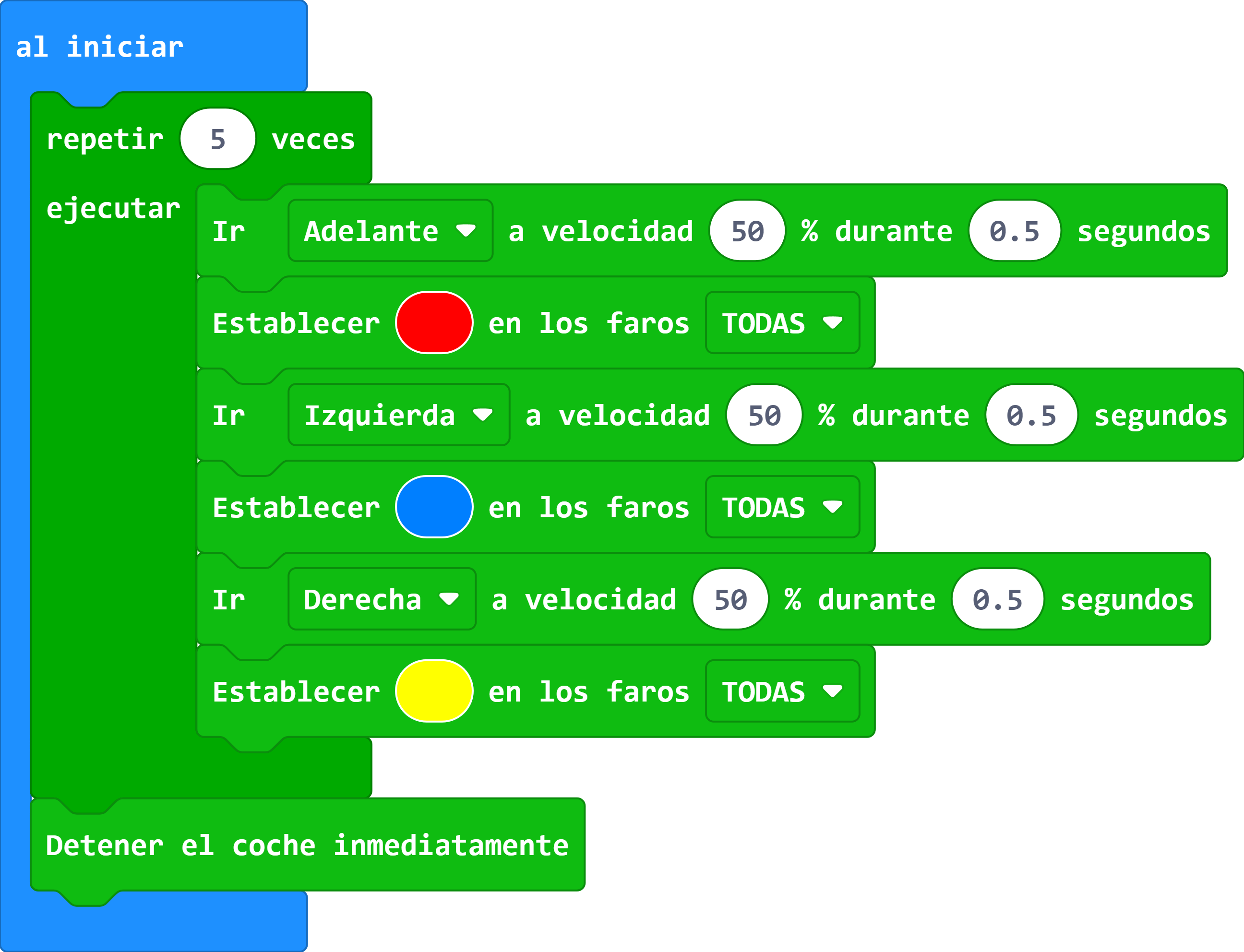
El coche avanza, gira a la derecha y la izquierda de forma intermitente, y cambia el color de sus leds grandes con cada movimiento. Repetir las acciones 5 veces.
Programación
Para encender los leds tenemos un bloque «establecer … en los faros». Podemos elegir entre mostrar la luz en un solo faro o en los dos.
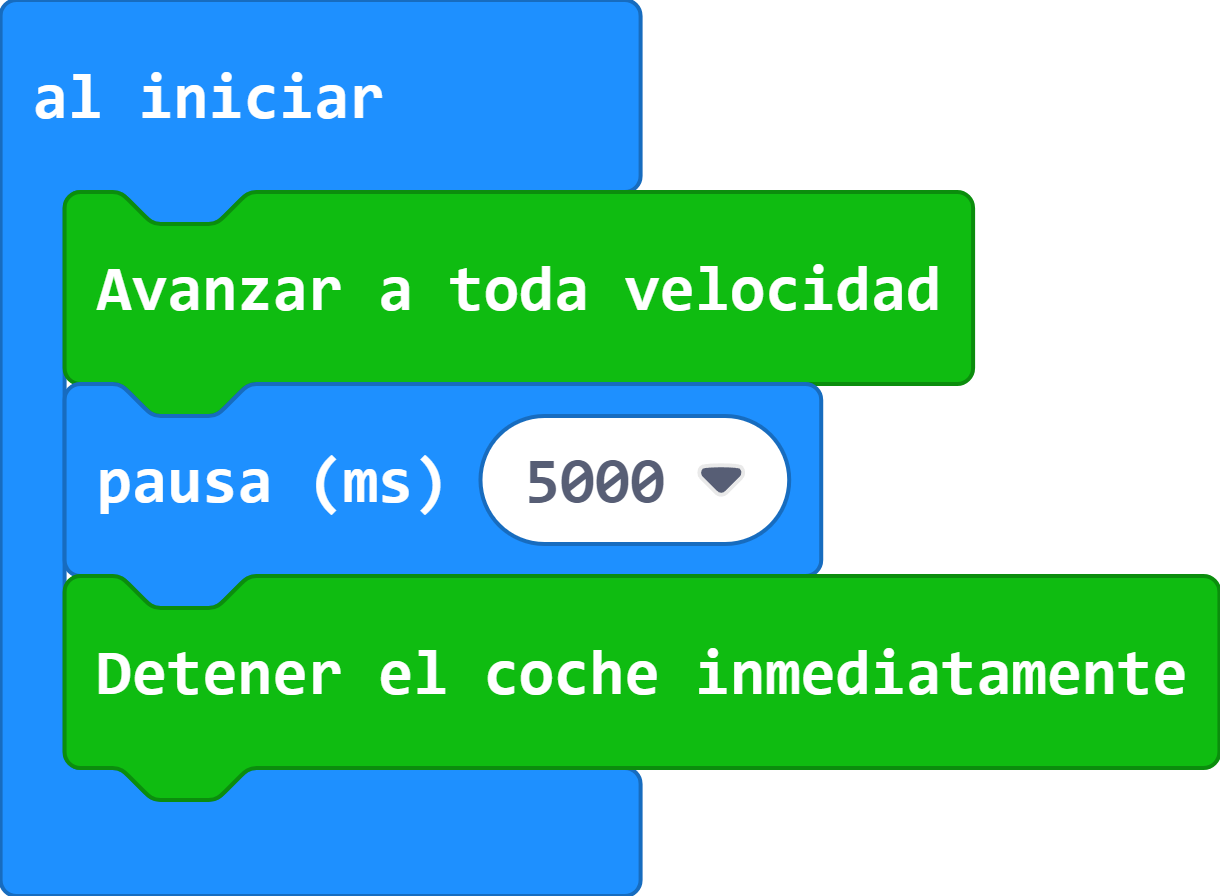
El coche avanza hacia adelante durante 5 segundos y después para.
Programación:
Puesto que es una acción que sólo ejecutamos una vez, introducimos los bloques de programación dentro del bloque «al inicial».
En la sección cutebot, encontrarás los bloques «avanzar a toda velocidad» y «detener inmediatamente». Serán los que utilicemos para mover el coche. Para determinar el tiempo de movimiento utilizamos el bloque «pausa». El objetivo de este bloque es que el programa ejecute el bloque anterior a él durante 5 segundo. Una vez pasados esos 5 segundos, se ejecutará el bloque siguiente.
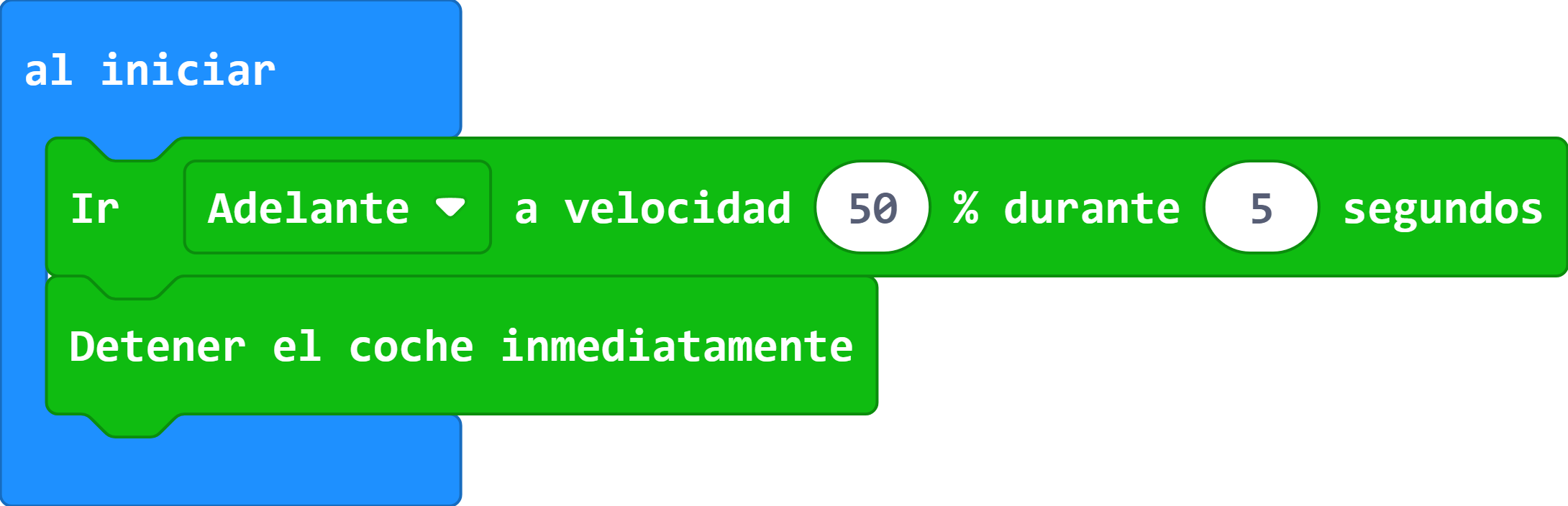
Si quieres que el vehículo retroceda, prueba a cambiar el bloque «avanzar a toda velocidad» por retroceder a toda velocidad.
Puedes utilizar el bloque «ir adelante a velocidad 50% durante 5 segundos» para modificar la velocidad de avance e incorporar el tiempo de desplazamiento en el mismo bloque,
GIRAR
Objetivo
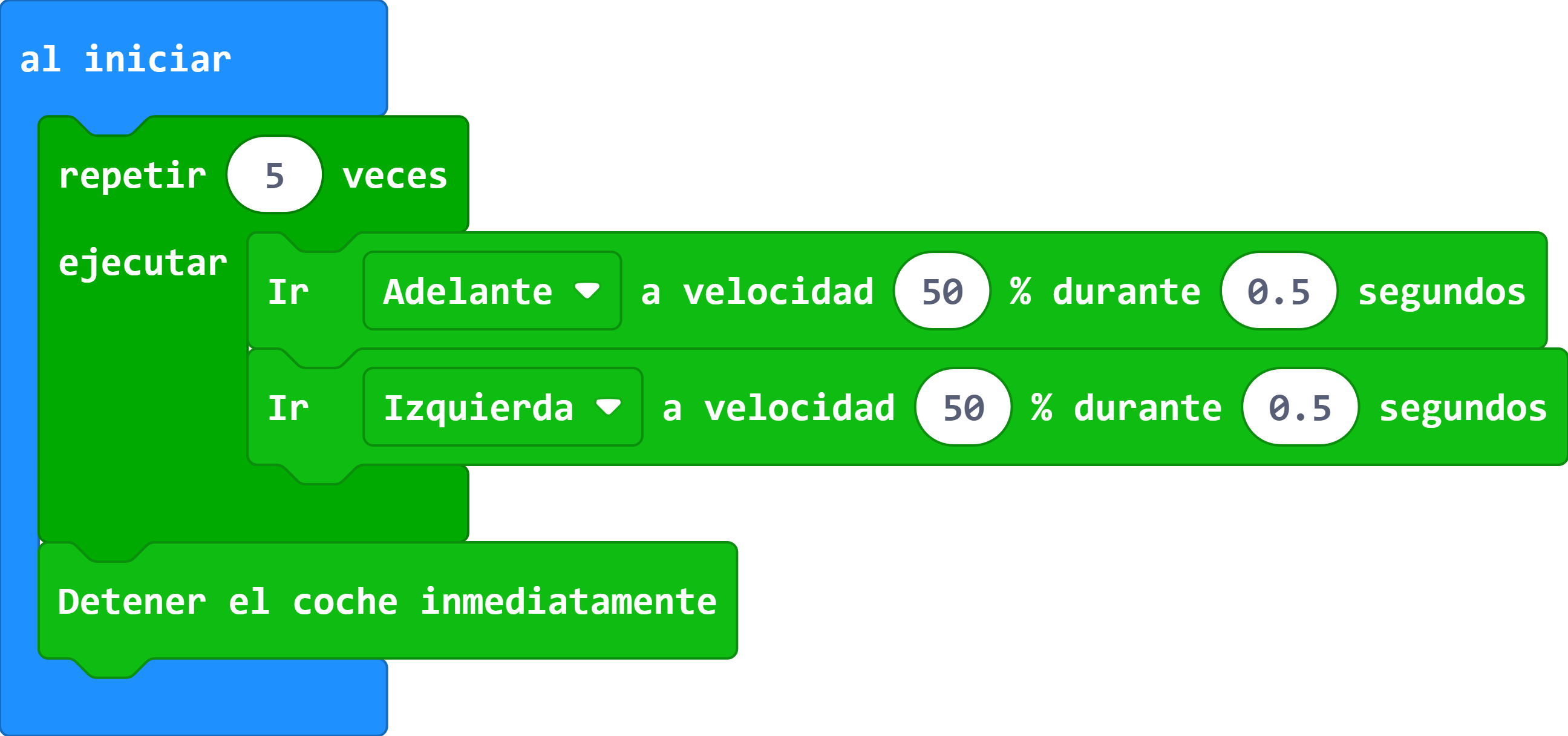
El coche gira a la derecha y la izquierda de forma intermitente. Realiza esta acción 5 veces.
Programación
Puesto que es una acción que sólo ejecutamos 5 veces, utilizamos un bucle dentro del bloque «al iniciar».
En la sección cutebot, encontrarás los bloques «ir adelante a velocidad 50% durante 5 segundo». Si pulsas sobre «adelante» puedes cambiar la dirección de avance.