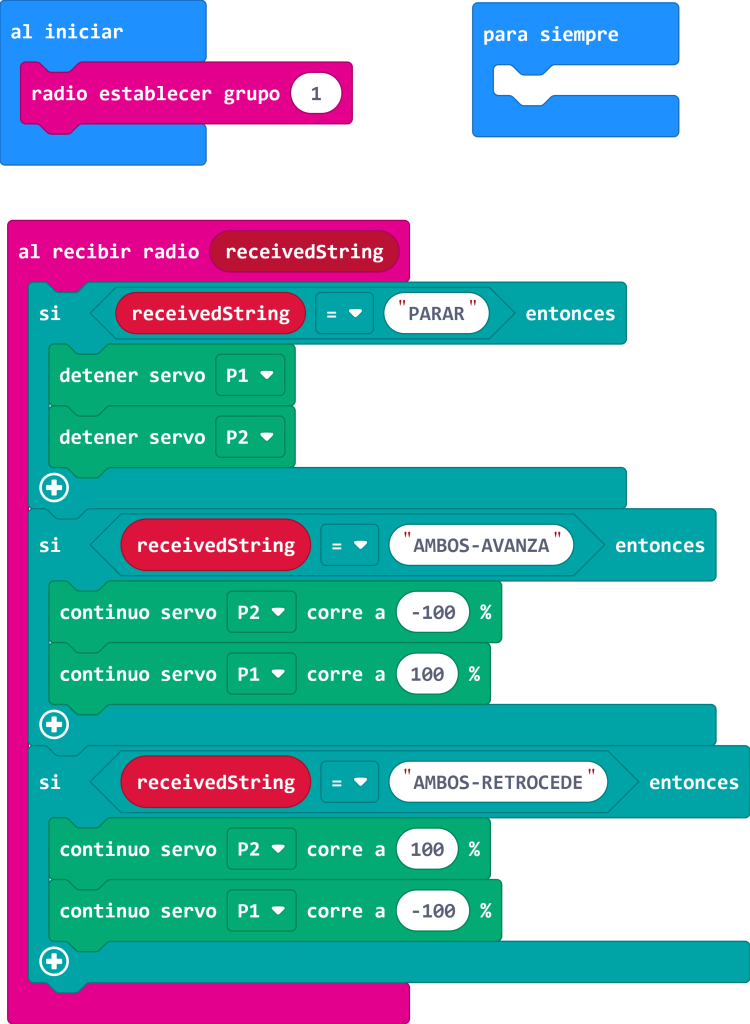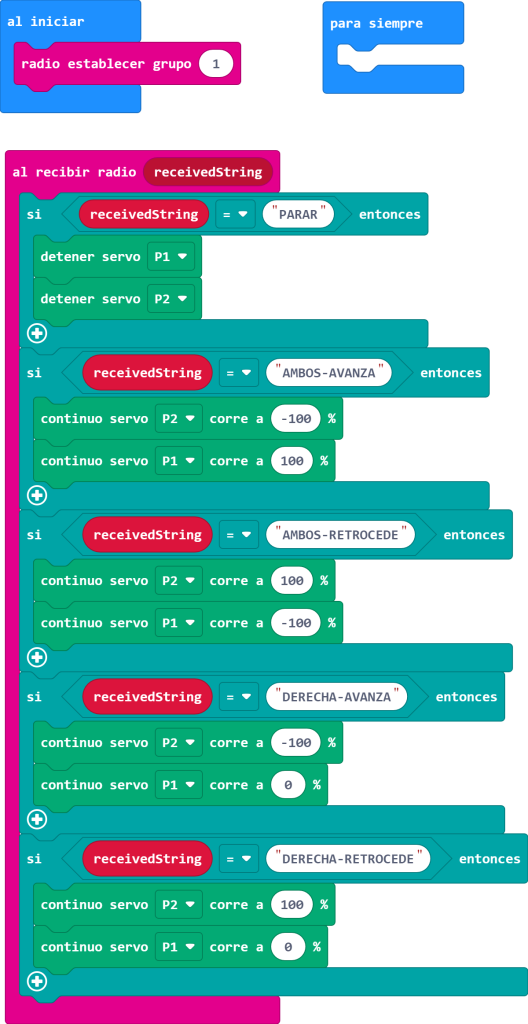
Utilizamos este bloque para que el robot avance hacia adelante a la máxima velocidad que admitan los motores.
Utilizamos este bloque para que el robot gire hacia la derecha a la máxima velocidad que admitan los motores, provocando un giro brusco.
Utilizamos este bloque para que el robot gire hacia la izquierda a la máxima velocidad que admitan los motores, provocando un giro brusco.
Utilizamos este bloque para que el robot retroceda a la máxima velocidad que admitan los motores.
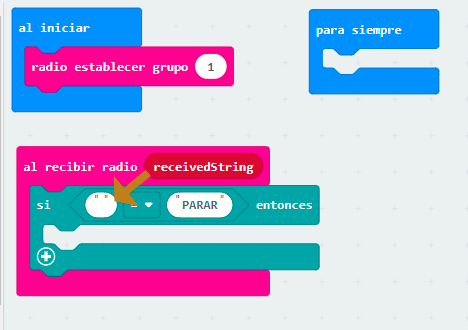
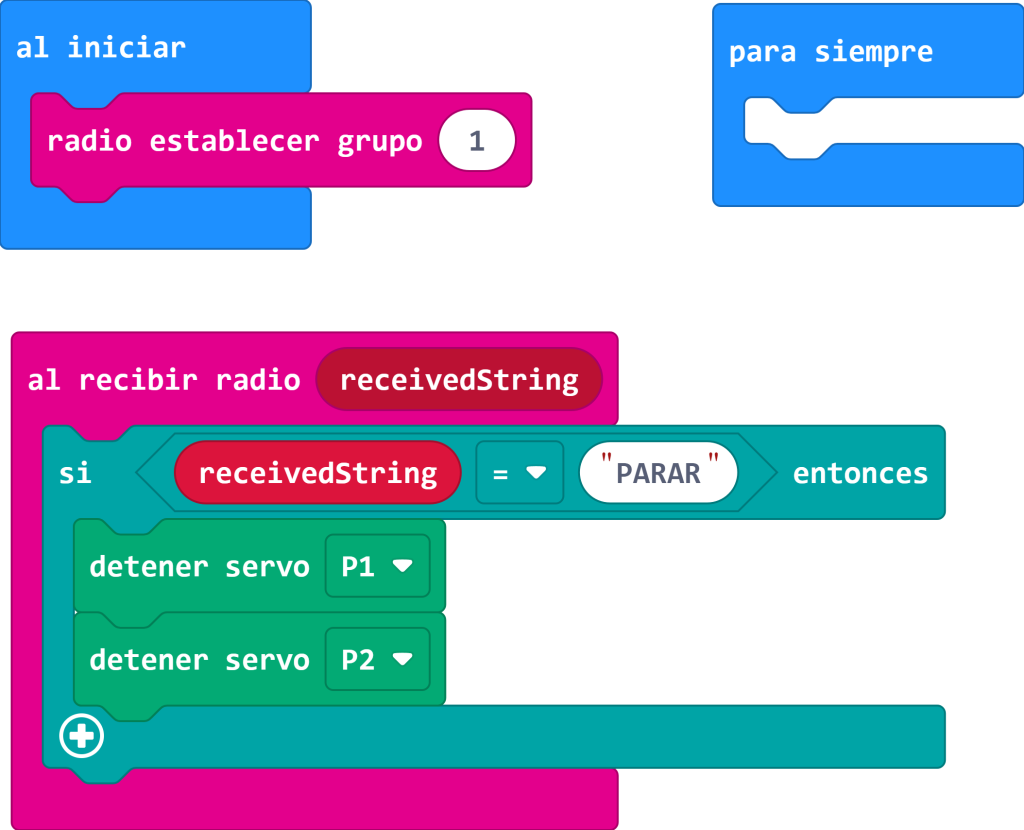
Utilizamos este bloque para parar los motores, deteniendo la marcha del robot.

Utilizamos este bloque para hacer el coche avance o gire a una determinada velocidad y durante un tiempo concreto.
![]()
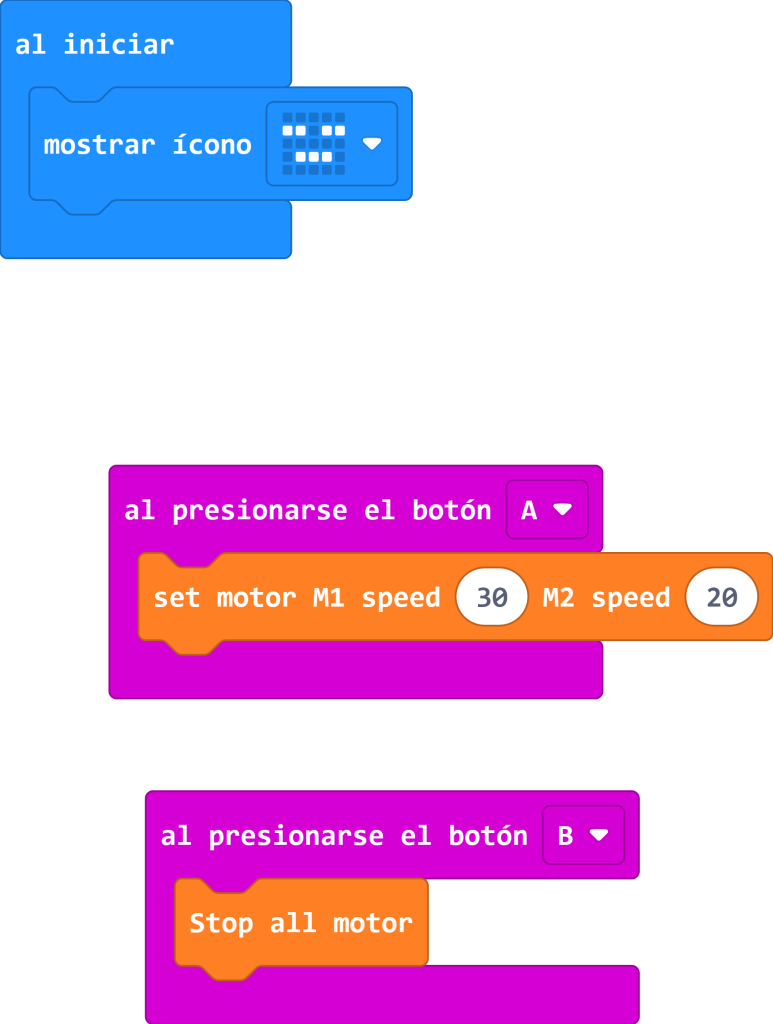
Podemos establecer distinta velocidad de giro a los motores, provocando un giro a la derecha o a la izquierda más o menos pronunciado.

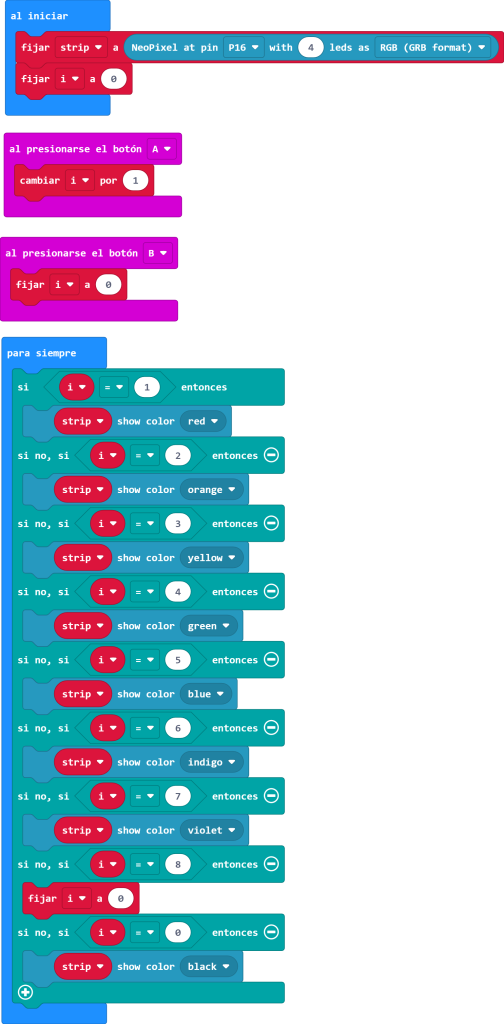
Utilizamos este bloque para encender los faros con luz de un determinado color. Podemos encender un solo faro o los dos.

Utilizamos este bloque para encender los faros con luz de un determinado color, eligiendo qué cantidad de luz roja (R), verde (G) o azul (B) vamos a poner (entre 0 y 255).
Utilizamos este bloque para apagar todos los leds del robot.

Utilizamos este bloque dentro de un bloque condicional (si… si no…). Así indicaremos qué debe hacer el coche si detecta que los sensores de línea están sobre una zona negra, sobre una zona blanca, o uno en zona negra y el otro en zona blanca.

Utilizamos este bloque para realizar el conjunto de acciones que se indiquen siempre y cuando se de la condición que se especifique. Puede ser haber detectado o no una línea por uno o ambos sensores.
Utilizamos este bloque cuando programamos el robot para que siga las órdenes de un mando a distancia IR. Cuando se presiona un botón del mando a distancia, el robot recibe una señal y realiza los bloques que insertemos dentro de éste.

Utilizamos este bloque dentro de un bloque condicional (si …. si no…). Según el botón que se haya presionado en el mando a distancia, decidimos qué acción debe realizar el robot.

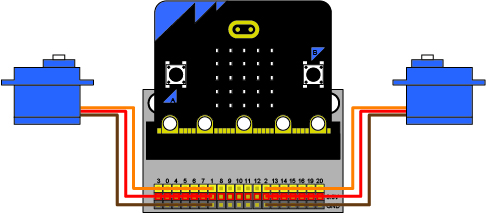
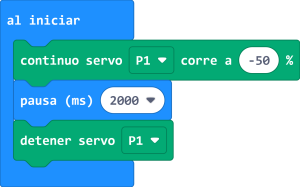
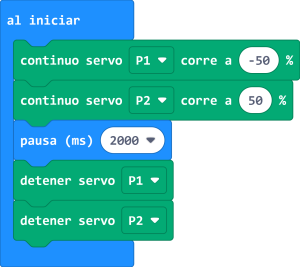
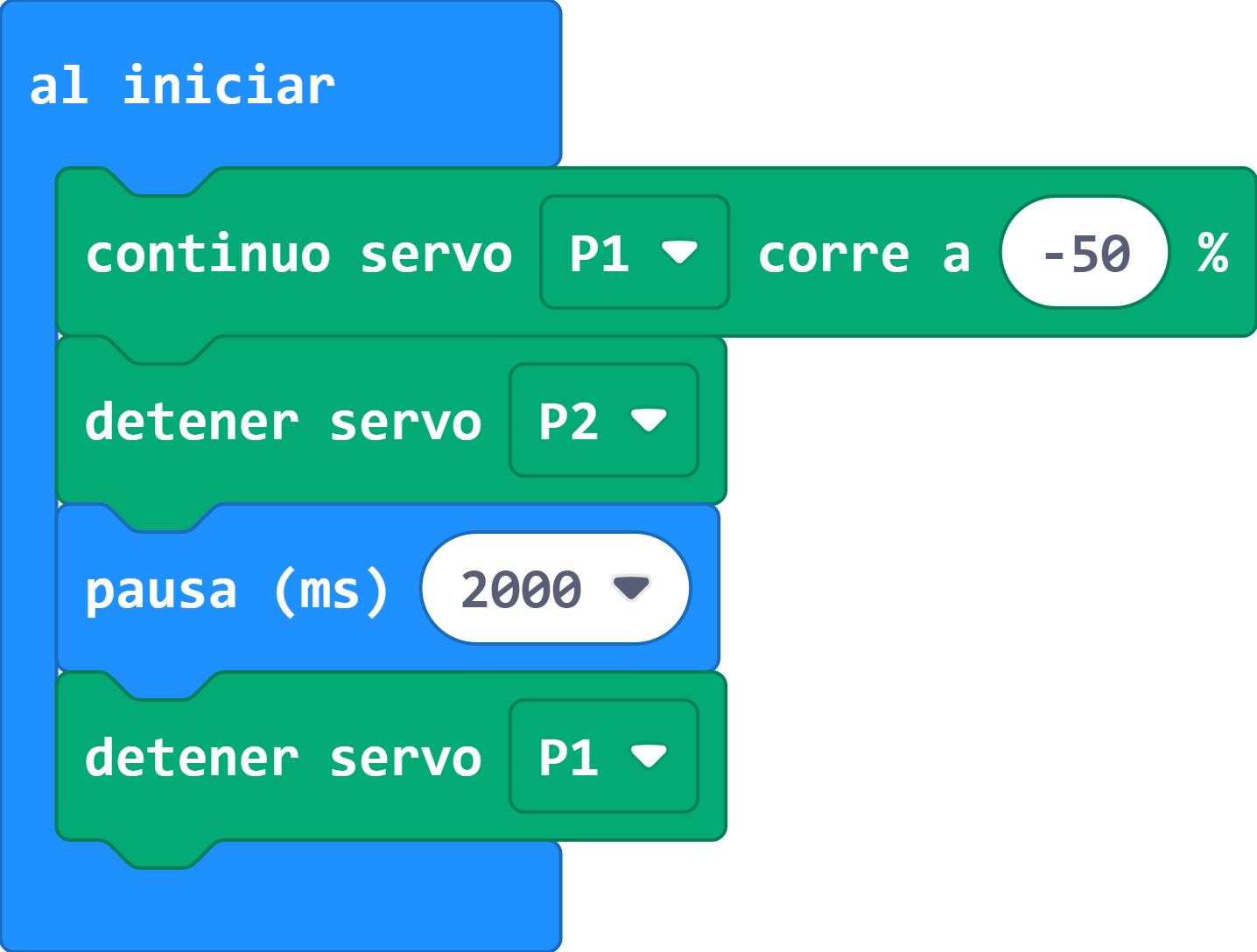
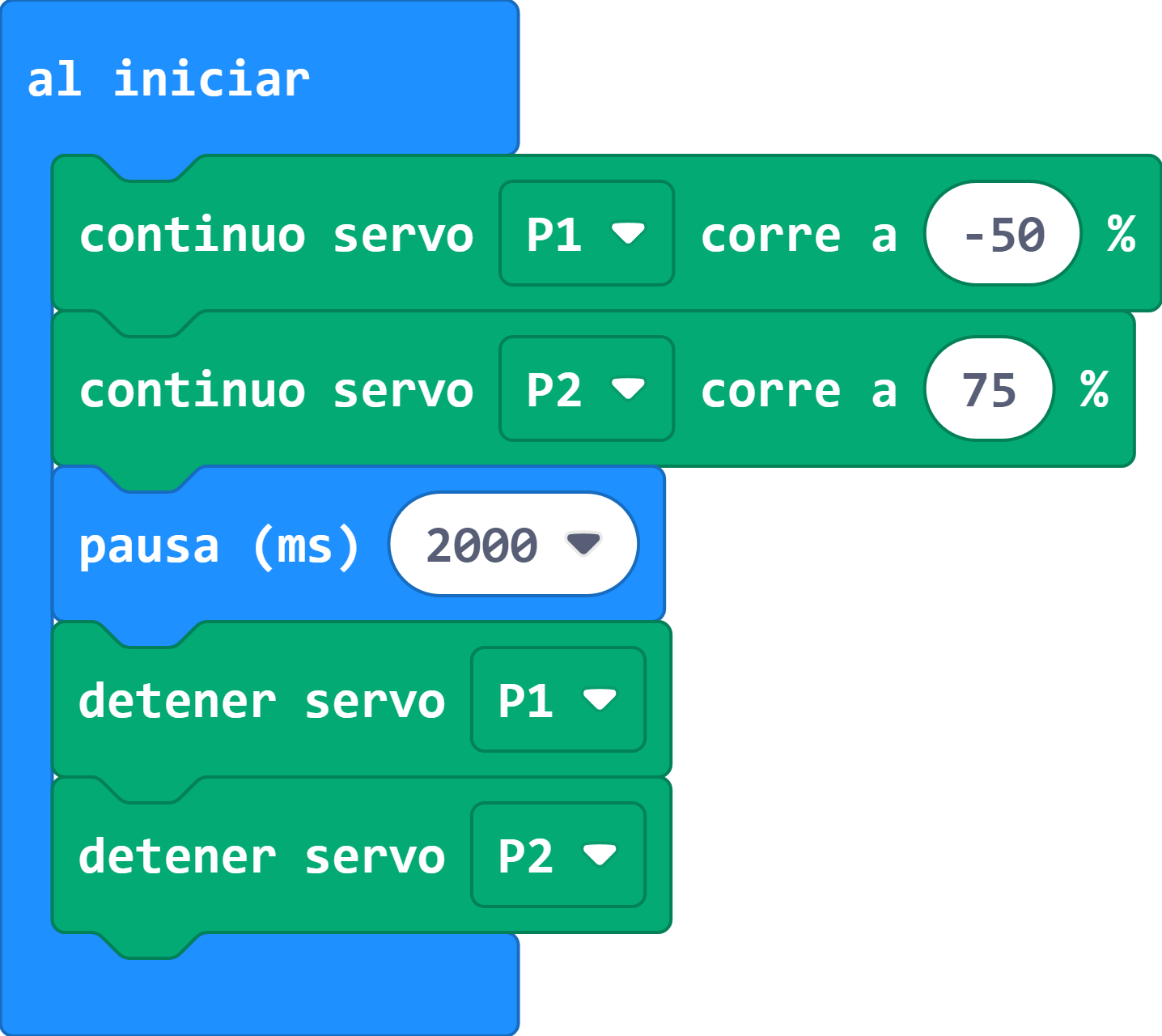
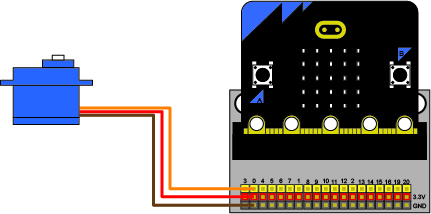
Para utilizar este bloque debemos insertar un servomotor en el robot, en los pines S1 o S2. Una vez conectado, podremos programar en que ángulo vamos a posicionar al motor (entre 0 y 180º).

Este bloque guarda la distancia al objeto frente al robot más cercano detectado por el sensor ultrasonido.